
2024
hi
Matthew, V., Simancek, R. E., Telepo, E., Machesky, J., Willman, H., Ismail, A. B., Schulz, A. K.
Empowering Change: The Role of Student Changemakers in Advancing Sustainability within Engineering Education
Proceedings of the American Society of Engineering Education (ASEE), June 2024, Victoria Matthew and Andrew K. Schulz contributed equally to this publication. (issue) In press
ei
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ei
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)

2023
sf
Barocas, S., Hardt, M., Narayanan, A.
Fairness in Machine Learning: Limitations and Opportunities
MIT Press, December 2023 (book)
ei
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
2022
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
sf
Hardt, M., Recht, B.
Patterns, Predictions, and Actions: Foundations of Machine Learning
Princeton University Press, August 2022 (book)
ei
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
2021
ei
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
re
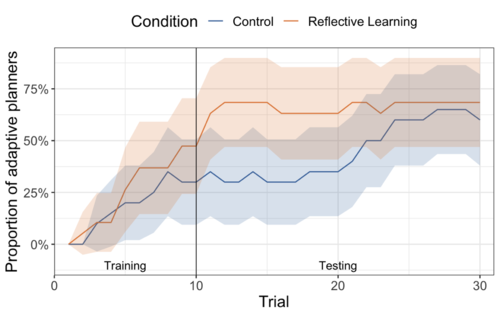
Frederic Becker, , Lieder, F.
Promoting metacognitive learning through systematic reflection
The first edition of Life Improvement Science Conference, June 2021 (poster)
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
ei
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)

ei
hi
ps
pi
rm
Scientific Report 2016 - 2021
2021 (mpi_year_book)
2020
mms
Nacke, R.
Voltage dependent interfacial magnetism in multilayer systems
Universität Stuttgart, Stuttgart, December 2020 (thesis)
dlg
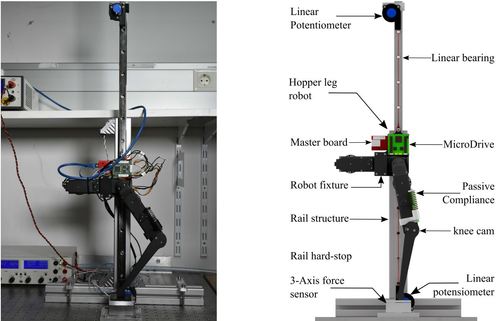
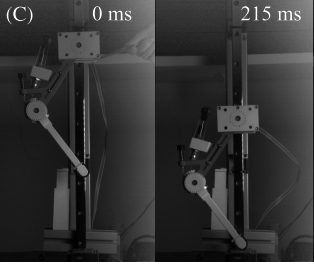
Milad Shafiee Ashtiani, A. A. S., Badri-Sproewitz, A.
Towards Hybrid Active and Passive Compliant Mechanisms in Legged Robots
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2020 (poster) Accepted
dlg
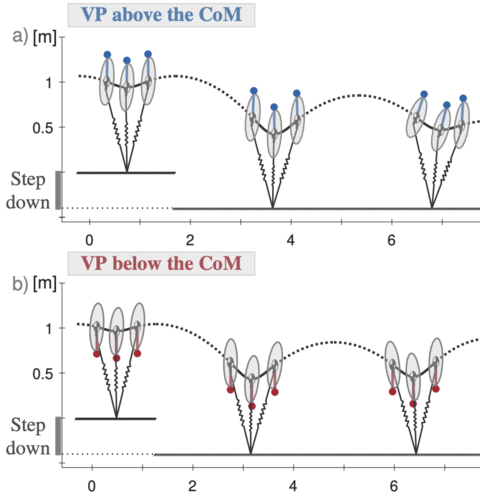
Drama, Ö., Badri-Spröwitz, A.
VP above or below? A new perspective on the story of the virtual point
Dynamic Walking, May 2020 (poster)
dlg
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Viscous Damping in Legged Locomotion
Dynamic Walking, May 2020 (poster)
dlg
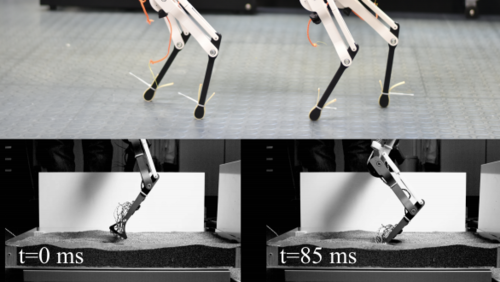
Ruppert, F., Badri-Spröwitz, A.
How Quadrupeds Benefit from Lower Leg Passive Elasticity
Dynamic Walking, May 2020 (poster)
icm
Dertli, Denis
Nichtgleichgewichtsdynamik einer abgekühlten kritischen Flüssigkeit mit Oberflächenfeldern unterschiedlichen Vorzeichens
Universität Stuttgart, Stuttgart, January 2020 (thesis)
dlg
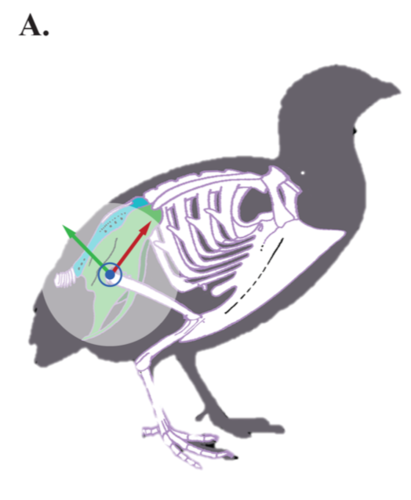
Kamska, V., Daley, M., Badri-Spröwitz, A.
Potential for elastic soft tissue deformation and mechanosensory function within the lumbosacral spinal canal of birds
Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2020), January 2020 (poster)
ev
25th International Symposium on Vision, Modeling and Visualization, VMV 2020
(Editors: Jens Krüger and Matthias Nießner and Jörg Stückler), Eurographics Association, 2020 (proceedings)
am
ics
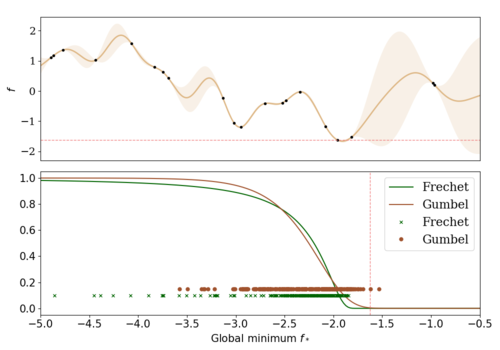
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision

avg
Janai, J., Güney, F., Behl, A., Geiger, A.
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
12(1-3), Foundations and Trends® in Computer Graphics and Vision, now Publishers Inc., Hanover, MA, 2020 (book)
2019
ps
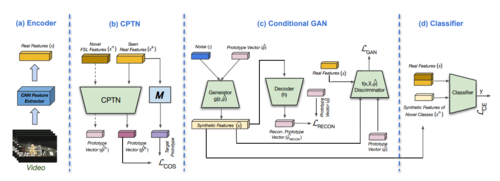
Dwivedi, S. K., Gupta, V., Mitra, R., Ahmed, S., Jain, A.
ProtoGAN: Towards Few Shot Learning for Action Recognition
Proc. International Conference on Computer Vision (ICCV) Workshops, October 2019 (manual)
ei
Meding, K., Schölkopf, B., Wichmann, F. A.
Perception of temporal dependencies in autoregressive motion
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
ei
Bruijns, S. A., Meding, K., Schölkopf, B., Wichmann, F. A.
Phenomenal Causality and Sensory Realism
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
ei
Lutz, P.
Automatic Segmentation and Labelling for Robot Table Tennis Time Series
Technical University Darmstadt, Germany, August 2019 (thesis)
ei
Shao, K., Logothetis, N., Besserve, M.
Neural mass modeling of the Ponto-Geniculo-Occipital wave and its neuromodulation
28th Annual Computational Neuroscience Meeting (CNS*2019), July 2019 (poster)
ics
Mager, F., Baumann, D., Jacob, R., Thiele, L., Trimpe, S., Zimmerling, M.
Demo Abstract: Fast Feedback Control and Coordination with Mode Changes for Wireless Cyber-Physical Systems
Proceedings of the 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 340-341, 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), April 2019 (poster)
icm
Pranjić, Daniel
Fluctuating interface with a pinning potential
Universität Stuttgart, Stuttgart, 2019 (thesis)

ei
hi
ps
pi
Scientific Report 2016 - 2018
2019 (mpi_year_book)
mms
Keskinbora, K.
Prototyping Micro- and Nano-Optics with Focused Ion Beam Lithography
SL48, pages: 46, SPIE.Spotlight, SPIE Press, Bellingham, WA, 2019 (book)
icm
Beyer, David Bernhard
Controlling pattern formation in the confined Schnakenberg model
Universität Stuttgart, Stuttgart, 2019 (thesis)

pf
Itzigehl, Selina
HPLC separation of ligand-exchanged gold clusters with atomic precision
Univ. of Stuttgart, 2019 (thesis)
2018
ics
Mager, F., Baumann, D., Trimpe, S., Zimmerling, M.
Poster Abstract: Toward Fast Closed-loop Control over Multi-hop Low-power Wireless Networks
Proceedings of the 17th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 158-159, Porto, Portugal, April 2018 (poster)
ei
Goris, R., Henaff, O., Meding, K.
Representation of sensory uncertainty in macaque visual cortex
Computational and Systems Neuroscience (COSYNE) 2018, March 2018 (poster)
dlg
Richter, J.
Untersuchung und Charakterisierung von Teilelementen der Modifikation im Lumbosacralbereich von Vögeln
Hochschule Harz, 2018 (thesis)
icm
Maihöfer, Michael
Pattern forming systems under confinement
Universität Stuttgart, Stuttgart, 2018 (thesis)
icm
Bebon, Rick
Electrostatic interaction between colloids with constant surface potentials at fluid interfaces
Universität Stuttgart, Stuttgart, 2018 (thesis)
ei
Safavi, S., Panagiotaropoulos, T., Kapoor, V., Logothetis, N. K., Besserve, M.
Generalized phase locking analysis of electrophysiology data
7th AREADNE Conference on Research in Encoding and Decoding of Neural Ensembles, 2018 (poster)
icm
Wilke, Moritz
Non-equilibrium dynamics of a binary solvent around heated colloidal particles
Universität Stuttgart, Stuttgart, 2018 (thesis)
icm
Meiler, Tim
Monte Carlo study of colloidal structure formation at fluid interfaces
Universität Stuttgart, Stuttgart, 2018 (thesis)

pf
Hornberger, Lea-Sophie
DNA-linked gold nanoclusters
Univ. of Stuttgart, 2018 (thesis)
ei
Pérez-Pellitero, E., Sajjadi, M. S. M., Hirsch, M., Schölkopf, B.
Photorealistic Video Super Resolution
Workshop and Challenge on Perceptual Image Restoration and Manipulation (PIRM) at the 15th European Conference on Computer Vision (ECCV), 2018 (poster)
ei
Meding, K., Hirsch, M., Wichmann, F. A.
Retinal image quality of the human eye across the visual field
14th Biannual Conference of the German Society for Cognitive Science (KOGWIS 2018), 2018 (poster)
pf
Wu, Z., Troll, J., Jeong, H., Qiang, W., Stang, M., Ziemssen, F., Wang, Z., Dong, M., Schnichels, S., Qiu, T., Fischer, P.
Nanorobots propel through the eye
Max Planck Society, 2018 (mpi_year_book)
icm
Sattler, Alexander
Surface structure of liquid crystals
Universität Stuttgart, Stuttgart, 2018 (thesis)

pf
Vogt, Pascal
HPLC-Trennung von Gold-clustern
Univ. of Stuttgart, 2018 (thesis)
2017
ei
Aghaeifar, A., Loktyushin, A., Eschelbach, M., Scheffler, K.
Improving performance of linear field generation with multi-coil setup by optimizing coils position
Magnetic Resonance Materials in Physics, Biology and Medicine, 30(Supplement 1):S259, 34th Annual Scientific Meeting of the European Society for Magnetic Resonance in Medicine and Biology (ESMRMB), October 2017 (poster)
ei
Loktyushin, A., Ehses, P., Schölkopf, B., Scheffler, K.
Estimating B0 inhomogeneities with projection FID navigator readouts
25th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), April 2017 (poster)