Empirische Inferenz
Autonomous Motion
Movement Generation and Control
Conference Paper
2020
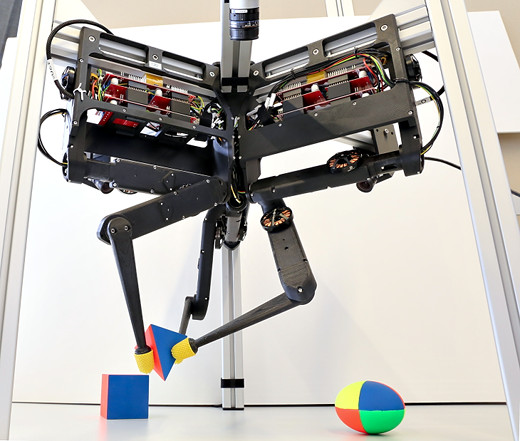
TriFinger: An Open-Source Robot for Learning Dexterity
PDF


Empirische Inferenz

Movement Generation and Control

Empirische Inferenz

Movement Generation and Control


Movement Generation and Control



Empirische Inferenz
| Author(s): | Wüthrich, M. and Widmaier, F. and Grimminger, F. and Akpo, J. and Joshi, S. and Agrawal, V. and Hammoud, B. and Khadiv, M. and Bogdanovic, M. and Berenz, V. and Viereck, J. and Naveau, M. and Righetti, L. and Schölkopf, B. and Bauer, S. |
| Links: | |
| Book Title: | Proceedings of the 4th Conference on Robot Learning (CoRL) |
| Volume: | 155 |
| Pages: | 1871--1882 |
| Year: | 2020 |
| Month: | November |
| Series: | Proceedings of Machine Learning Research |
| Editors: | Jens Kober and Fabio Ramos and Claire J. Tomlin |
| Publisher: | PMLR |
| Bibtex Type: | Conference Paper (conference) |
| Event Place: | Virtual Conference |
| State: | Published |
| URL: | https://proceedings.mlr.press/v155/wuthrich21a.html |
| Electronic Archiving: | grant_archive |
BibTex
@conference{Wuthrichetal20,
title = {TriFinger: An Open-Source Robot for Learning Dexterity},
booktitle = {Proceedings of the 4th Conference on Robot Learning (CoRL)},
volume = {155},
pages = {1871--1882},
series = {Proceedings of Machine Learning Research},
editors = {Jens Kober and Fabio Ramos and Claire J. Tomlin},
publisher = {PMLR},
month = nov,
year = {2020},
slug = {wuthrichetal20},
author = {W{\"u}thrich, M. and Widmaier, F. and Grimminger, F. and Akpo, J. and Joshi, S. and Agrawal, V. and Hammoud, B. and Khadiv, M. and Bogdanovic, M. and Berenz, V. and Viereck, J. and Naveau, M. and Righetti, L. and Sch{\"o}lkopf, B. and Bauer, S.},
url = {https://proceedings.mlr.press/v155/wuthrich21a.html},
month_numeric = {11}
}