Dynamic Locomotion
Poster
2020
VP above or below? A new perspective on the story of the virtual point


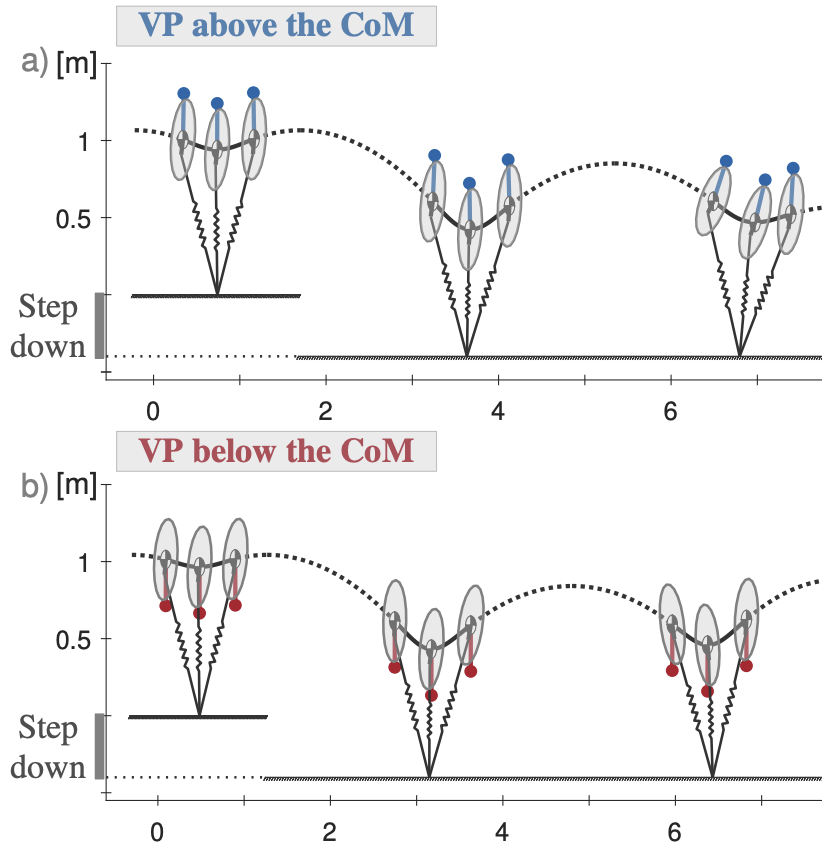
The spring inverted pendulum model with an extended trunk (TSLIP) is widely used to investigate the postural stability in bipedal locomotion [1, 2]. The challenge of the model is to define a hip torque that generates feasible gait patterns while stabilizing the floating trunk. The virtual point (VP) method is proposed as a simplified solution, where the hip torque is coupled to the passive compliant leg force via a virtual point. This geometric coupling is based on the assumption that the instantaneous ground reaction forces of the stance phase (GRF) intersect at a single virtual point.
| Author(s): | Özge Drama and Alexander Badri-Spröwitz |
| Year: | 2020 |
| Month: | May |
| Bibtex Type: | Poster (poster) |
| Digital: | True |
| Electronic Archiving: | grant_archive |
| Event Name: | Dynamic Walking |
| URL: | https://www.seas.upenn.edu/~posa/DynamicWalking2020/601-869-1-RV.pdf |
| Attachments: | |
BibTex
@poster{drama2020a,
title = {VP above or below? A new perspective on the story of the virtual point},
abstract = {The spring inverted pendulum model with an extended trunk (TSLIP) is widely used to investigate the postural stability in bipedal locomotion [1, 2]. The challenge of the model is to define a hip torque that generates feasible gait patterns while stabilizing the floating trunk. The virtual point (VP) method is proposed as a simplified solution, where the hip torque is coupled to the passive compliant leg force via a virtual point. This geometric coupling is based on the assumption that the instantaneous ground reaction forces of the stance phase (GRF) intersect at a single virtual point.
},
month = may,
year = {2020},
slug = {vp-above-or-below-a-new-perspective-on-the-story-of-the-virtual-point},
author = {Drama, Özge and Badri-Spr{\"o}witz, Alexander},
url = {https://www.seas.upenn.edu/~posa/DynamicWalking2020/601-869-1-RV.pdf},
month_numeric = {5}
}