

Recently developed and fully actuated, legged robots start showing exciting locomotion capabilities, but rely heavily on high-power actuators, high-frequency sensors, and complex locomotion controllers. The engineering solutions implemented in these legged robots are much different compared to animals. Vertebrate animals share magnitudes slower neurocontrol signal velocities [1] compared to their robot counterparts. Also, animals feature a plethora of cascaded and underactuated passive elastic structures [2].
| Author(s): | Felix Ruppert and Alexander Badri-Spröwitz |
| Year: | 2020 |
| Month: | May |
| Bibtex Type: | Poster (poster) |
| Digital: | True |
| Electronic Archiving: | grant_archive |
| Event Name: | Dynamic Walking |
| Event Place: | USA |
| URL: | https://www.seas.upenn.edu/~posa/DynamicWalking2020/643-944-1-RV.pdf |
| Attachments: | |
BibTex
@poster{ruppert2020b,
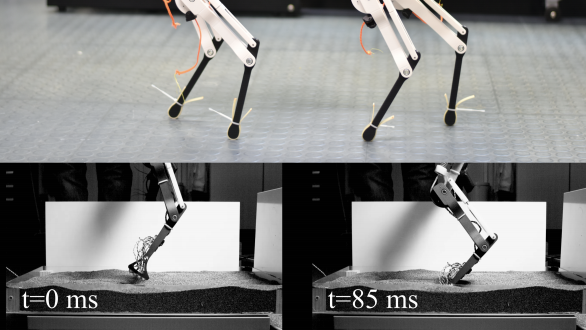
title = {How Quadrupeds Benefit from Lower Leg Passive Elasticity},
abstract = {Recently developed and fully actuated, legged robots start showing exciting locomotion capabilities, but rely heavily on high-power actuators, high-frequency sensors, and complex locomotion controllers. The engineering solutions implemented in these legged robots are much different compared to animals. Vertebrate animals share magnitudes slower neurocontrol signal velocities [1] compared to their robot counterparts. Also, animals feature a plethora of cascaded and underactuated passive elastic structures [2].
},
month = may,
year = {2020},
slug = {how-quadrupeds-benefit-from-lower-leg-passive-elasticity},
author = {Ruppert, Felix and Badri-Spr{\"o}witz, Alexander},
url = {https://www.seas.upenn.edu/~posa/DynamicWalking2020/643-944-1-RV.pdf},
month_numeric = {5}
}