
2023
ei
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
ei
Jin, Z., Mihalcea, R.
Natural Language Processing for Policymaking
In Handbook of Computational Social Science for Policy, pages: 141-162, 7, (Editors: Bertoni, E. and Fontana, M. and Gabrielli, L. and Signorelli, S. and Vespe, M.), Springer International Publishing, 2023 (inbook)
2022
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
pf
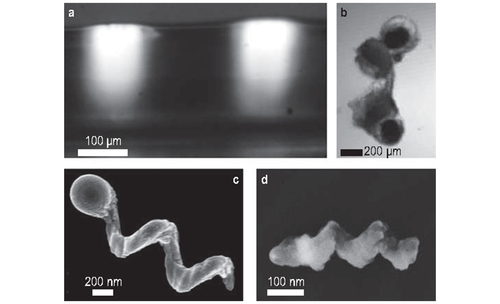
Qiu, T., Jeong, M., Goyal, R., Kadiri, V., Sachs, J., Fischer, P.
Magnetic Micro-/Nanopropellers for Biomedicine
In Field-Driven Micro and Nanorobots for Biology and Medicine, pages: 389-410, 16, (Editors: Sun, Y. and Wang, X. and Yu, J.), Springer, Cham, 2022 (inbook)
re
Lieder, F., Prentice, M.
Life Improvement Science
In Encyclopedia of Quality of Life and Well-Being Research, Springer, November 2022 (inbook)
ei
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
ei
Peters, J., Bauer, S., Pfister, N.
Causal Models for Dynamical Systems
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 671-690, 1, Association for Computing Machinery, 2022 (inbook)
ei
plg
Karimi, A. H., von Kügelgen, J., Schölkopf, B., Valera, I.
Towards Causal Algorithmic Recourse
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 139-166, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Salewski, L., Koepke, A. S., Lensch, H. P. A., Akata, Z.
CLEVR-X: A Visual Reasoning Dataset for Natural Language Explanations
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 69-88, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Schölkopf, B.
Causality for Machine Learning
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 765-804, 1, Association for Computing Machinery, New York, NY, USA, 2022 (inbook)
2021
rm
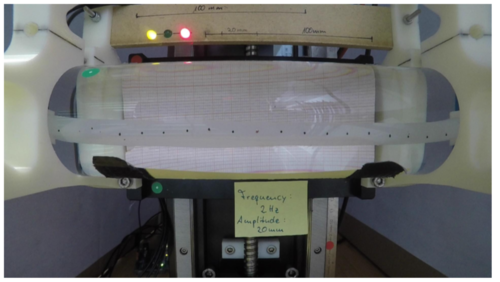
Purnendu, , Novack, S., Acome, E., Alistar, M., Keplinger, C., Gross, M. D., Bruns, C., Leithinger, D.
Electriflow: Augmenting Books With Tangible Animation Using Soft Electrohydraulic Actuators
In ACM SIGGRAPH 2021 Labs, pages: 1-2, Association for Computing Machinery, SIGGRAPH 2021, August 2021 (inbook)
ei
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
minibot
Chu, X., Wang, W., Müller, J., Schöning, H. V., Liu, Y., Weigand, B.
Turbulence Modulation and Energy Transfer in Turbulent Channel Flow Coupled with One-Side Porous Media
In High Performance Computing in Science and Engineering’20, pages: 373-386, Springer, 2021 (incollection)
2020
icm
Dertli, Denis
Nichtgleichgewichtsdynamik einer abgekühlten kritischen Flüssigkeit mit Oberflächenfeldern unterschiedlichen Vorzeichens
Universität Stuttgart, Stuttgart, January 2020 (thesis)
ev
25th International Symposium on Vision, Modeling and Visualization, VMV 2020
(Editors: Jens Krüger and Matthias Nießner and Jörg Stückler), Eurographics Association, 2020 (proceedings)
am
ics
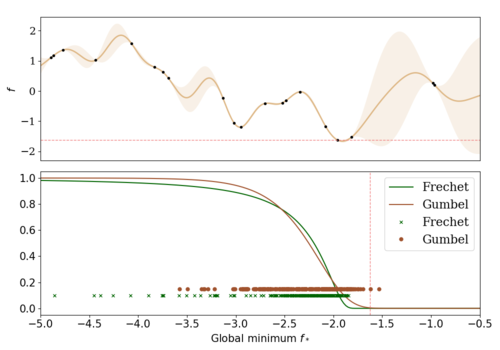
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision
ev
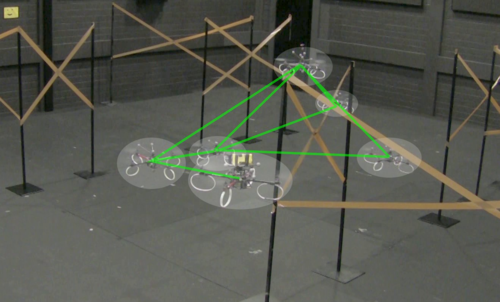
Usenko, V., Stumberg, L. V., Stückler, J., Cremers, D.
TUM Flyers: Vision-Based MAV Navigation for Systematic Inspection of Structures
In Bringing Innovative Robotic Technologies from Research Labs to Industrial End-users: The Experience of the European Robotics Challenges, 136, pages: 189-209, Springer Tracts in Advanced Robotics, Springer International Publishing, 2020 (inbook)
icm
Popescu, M. N., Uspal, W. E.
Adopting the Boundary Homogenization Approximation from Chemical Kinetics to Motile Chemically Active Particles
In Chemical Kinetics, pages: 517-540, (Editors: Lindenberg, Katja and Metzler, Ralf and Oshanin, Gleb), World Scientific, New Jersey, NJ, 2020 (incollection)
ncs
Thies, J., Zollhöfer, M., Theobalt, C., Stamminger, M., Nießner, M.
Image-guided Neural Object Rendering
In International Conference on Learning Representations, 2020 (incollection)
pf
Palagi, S.
Soft Microrobots Based on Photoresponsive Materials
In Mechanically Responsive Materials for Soft Robotics, pages: 327-362, (Editors: Koshima, Hideko), Wiley-VCH, Weinheim, 2020 (incollection)
2019
ei
Lutz, P.
Automatic Segmentation and Labelling for Robot Table Tennis Time Series
Technical University Darmstadt, Germany, August 2019 (thesis)
mms
Schütz, G.
Nanomagnetismus im Röntgenlicht
In Vielfältige Physik, pages: 173-182, Springer Spektrum, Berlin, Heidelberg, 2019 (incollection)
icm
Pranjić, Daniel
Fluctuating interface with a pinning potential
Universität Stuttgart, Stuttgart, 2019 (thesis)
icm
Beyer, David Bernhard
Controlling pattern formation in the confined Schnakenberg model
Universität Stuttgart, Stuttgart, 2019 (thesis)

pf
Itzigehl, Selina
HPLC separation of ligand-exchanged gold clusters with atomic precision
Univ. of Stuttgart, 2019 (thesis)

dlg
Badri-Spröwitz, A.
Das Tier als Modell für Roboter, und Roboter als Modell für Tiere
In pages: 167-175, Springer, 2019 (incollection)
2018
pf
Palagi, S., Walker, D. Q. T., Fischer, P.
Nanoscale robotic agents in biological fluids and tissues
In The Encyclopedia of Medical Robotics, 2, pages: 19-42, 2, (Editors: Desai, J. P. and Ferreira, A.), World Scientific, October 2018 (inbook)
hi
Kuchenbecker, K. J.
Haptics and Haptic Interfaces
In Encyclopedia of Robotics, (Editors: Marcelo H. Ang and Oussama Khatib and Bruno Siciliano), Springer, May 2018 (incollection)
dlg
Richter, J.
Untersuchung und Charakterisierung von Teilelementen der Modifikation im Lumbosacralbereich von Vögeln
Hochschule Harz, 2018 (thesis)
icm
Maihöfer, Michael
Pattern forming systems under confinement
Universität Stuttgart, Stuttgart, 2018 (thesis)
icm
Bebon, Rick
Electrostatic interaction between colloids with constant surface potentials at fluid interfaces
Universität Stuttgart, Stuttgart, 2018 (thesis)
ei
Schölkopf, B.
Maschinelles Lernen: Entwicklung ohne Grenzen?
In Mit Optimismus in die Zukunft schauen. Künstliche Intelligenz - Chancen und Rahmenbedingungen, pages: 26-34, (Editors: Bender, G. and Herbrich, R. and Siebenhaar, K.), B&S Siebenhaar Verlag, 2018 (incollection)
icm
Wilke, Moritz
Non-equilibrium dynamics of a binary solvent around heated colloidal particles
Universität Stuttgart, Stuttgart, 2018 (thesis)
ei
Wichmann, F. A., Jäkel, F.
Methods in Psychophysics
In Stevens’ Handbook of Experimental Psychology and Cognitive Neuroscience, 5 (Methodology), 7, 4th, John Wiley & Sons, Inc., 2018 (inbook)
icm
Meiler, Tim
Monte Carlo study of colloidal structure formation at fluid interfaces
Universität Stuttgart, Stuttgart, 2018 (thesis)

pf
Hornberger, Lea-Sophie
DNA-linked gold nanoclusters
Univ. of Stuttgart, 2018 (thesis)
ei
Jayaram, V., Fiebig, K., Peters, J., Grosse-Wentrup, M.
Transfer Learning for BCIs
In Brain–Computer Interfaces Handbook, pages: 425-442, 22, (Editors: Chang S. Nam, Anton Nijholt and Fabien Lotte), CRC Press, 2018 (incollection)
icm
Sattler, Alexander
Surface structure of liquid crystals
Universität Stuttgart, Stuttgart, 2018 (thesis)

pf
Vogt, Pascal
HPLC-Trennung von Gold-clustern
Univ. of Stuttgart, 2018 (thesis)
2017
pf
Palagi, S., (Walker) Schamel, D., Qiu, T., Fischer, P.
Chapter 8 - Micro- and nanorobots in Newtonian and biological viscoelastic fluids
In Microbiorobotics, pages: 133 - 162, 8, Micro and Nano Technologies, Second edition, Elsevier, Boston, March 2017 (incollection)
am
ei
Peters, J., Lee, D., Kober, J., Nguyen-Tuong, D., Bagnell, J., Schaal, S.
Robot Learning
In Springer Handbook of Robotics, pages: 357-394, 15, 2nd, (Editors: Siciliano, Bruno and Khatib, Oussama), Springer International Publishing, 2017 (inbook)
ei
Peters, J., Bagnell, J.
Policy Gradient Methods
In Encyclopedia of Machine Learning and Data Mining, pages: 982-985, 2nd, (Editors: Sammut, Claude and Webb, Geoffrey I.), Springer US, 2017 (inbook)
icm
Hölzl, Christian
Non-equilibrium forces after temperature quenches in ideal fluids with conserved density
Universität Stuttgart, Stuttgart, 2017 (thesis)

pf
Troll, Jonas
Enzyme activity and transport in biological media
Univ. of Stuttgart, 2017 (thesis)
ei
Flad, N., Fomina, T., Bülthoff, H. H., Chuang, L. L.
Unsupervised clustering of EOG as a viable substitute for optical eye-tracking
In First Workshop on Eye Tracking and Visualization (ETVIS 2015), pages: 151-167, Mathematics and Visualization, (Editors: Burch, M., Chuang, L., Fisher, B., Schmidt, A., and Weiskopf, D.), Springer, 2017 (inbook)
ei
Peters, J., Tedrake, R., Roy, N., Morimoto, J.
Robot Learning
In Encyclopedia of Machine Learning and Data Mining, pages: 1106-1109, 2nd, (Editors: Sammut, Claude and Webb, Geoffrey I.), Springer US, 2017 (inbook)
ei
Janzing, D.
Statistical Asymmetries Between Cause and Effect
In Time in Physics, pages: 129-139, Tutorials, Schools, and Workshops in the Mathematical Sciences, (Editors: Renner, Renato and Stupar, Sandra), Springer International Publishing, Cham, 2017 (inbook)

pf
Segreto, Nico
Propulsion of magnetic colloids at low Reynolds number
Univ. of Stuttgart, 2017 (thesis)
zwe-sw
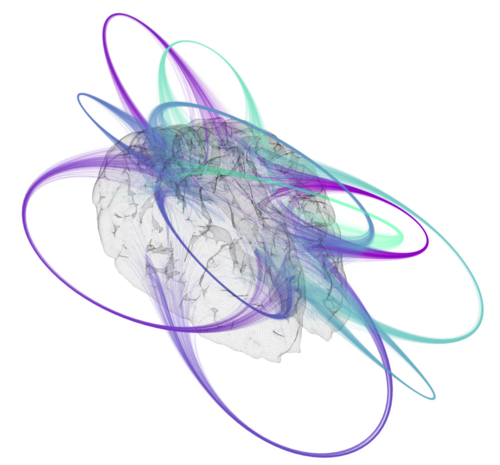
Bramlage, L.
Design of a visualization scheme for functional connectivity data of Human Brain
Hochschule Osnabrück - University of Applied Sciences, 2017 (thesis)
ps
Nestmeyer, T., Robuffo Giordano, P., Bülthoff, H. H., Franchi, A.
Decentralized Simultaneous Multi-target Exploration using a Connected Network of Multiple Robots
In pages: 989-1011, Autonomous Robots, 2017 (incollection)