
2024
hi
Matthew, V., Simancek, R. E., Telepo, E., Machesky, J., Willman, H., Ismail, A. B., Schulz, A. K.
Empowering Change: The Role of Student Changemakers in Advancing Sustainability within Engineering Education
Proceedings of the American Society of Engineering Education (ASEE), June 2024, Victoria Matthew and Andrew K. Schulz contributed equally to this publication. (issue) In press
ei
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ei
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
ei
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ev
Achterhold, J., Guttikonda, S., Kreber, J. U., Li, H., Stueckler, J.
Learning a Terrain- and Robot-Aware Dynamics Model for Autonomous Mobile Robot Navigation
CoRR abs/2409.11452, 2024, Preprint submitted to Robotics and Autonomous Systems Journal. https://arxiv.org/abs/2409.11452 (techreport) Submitted
lds
Eberhard, O., Vernade, C., Muehlebach, M.
A Pontryagin Perspective on Reinforcement Learning
Max Planck Institute for Intelligent Systems, 2024 (techreport)
lds
Er, D., Trimpe, S., Muehlebach, M.
Distributed Event-Based Learning via ADMM
Max Planck Institute for Intelligent Systems, 2024 (techreport)
ev
Baumeister, F., Mack, L., Stueckler, J.
Incremental Few-Shot Adaptation for Non-Prehensile Object Manipulation using Parallelizable Physics Simulators
CoRR abs/2409.13228, CoRR, 2024, Submitted to IEEE International Conference on Robotics and Automation (ICRA) 2025 (techreport) Submitted

2023
sf
Barocas, S., Hardt, M., Narayanan, A.
Fairness in Machine Learning: Limitations and Opportunities
MIT Press, December 2023 (book)
ei
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
rm
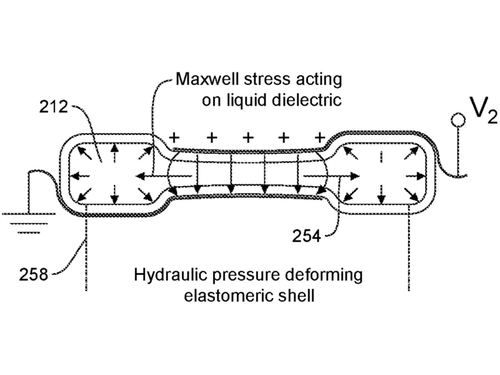
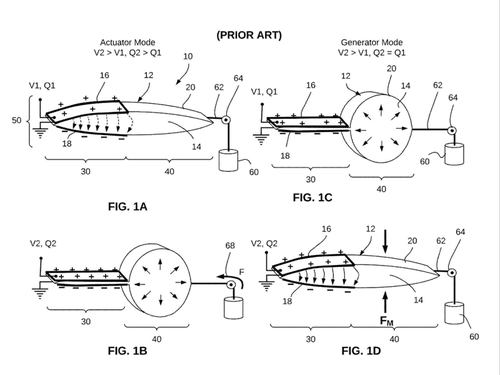
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K.
Hydraulically Amplified Self-healing Electrostatic Actuators
(US Patent 11795979B2), October 2023 (patent)
rm
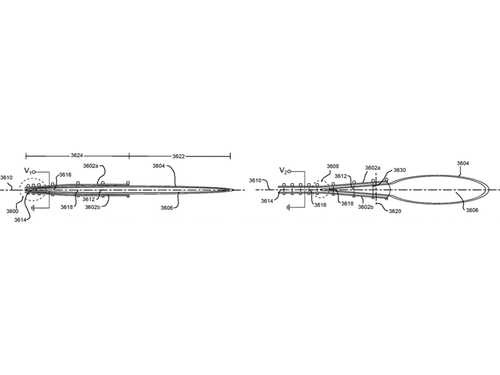
Keplinger, C. M., Wang, X., Mitchell, S. K.
High Strain Peano Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers
(US Patent App. 18/138,621), August 2023 (patent)
rm
Correll, N., Ly, K. D., Kellaris, N. A., Keplinger, C. M.
Capacitive Self-Sensing for Electrostatic Transducers with High Voltage Isolation
(US Patent App. 17/928,453), June 2023 (patent)
rm
Keplinger, C. M., Wang, X., Mitchell, S. K.
High Strain Peano Hydraulically Amplified Self-healing Electrostatic (HASEL) Transducers
(US Patent 11635094), April 2023 (patent)
dlg
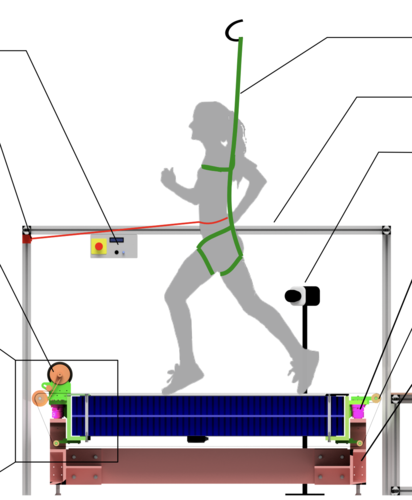
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
ei
Jin, Z., Mihalcea, R.
Natural Language Processing for Policymaking
In Handbook of Computational Social Science for Policy, pages: 141-162, 7, (Editors: Bertoni, E. and Fontana, M. and Gabrielli, L. and Signorelli, S. and Vespe, M.), Springer International Publishing, 2023 (inbook)
pi
Wang, T., Hu, W., Sitti, M.
Tube-shaped robotic device with anisotropic surface structure
2023, US Patent App. 18/133,104 (patent)
pi
Drotlef, D., Sitti, M., Amjadi, M.
Carrier, use of a carrier, method of activating a carrier and method of making a carrier
2023, US Patent App. 16/500,442 (patent)
ei
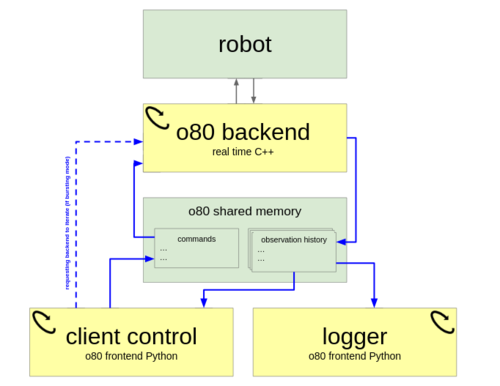
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
pi
Sitti, M., Aksak, B.
Microfibers with mushroom-shaped tips for optimal adhesion
2023, US Patent 11,613,674 (patent)
pi
Zhang, J., Ren, Z., Hu, W., Sitti, M.
Method of fabricating a magnetic deformable machine and deformable 3D magnetic machine
2023, US Patent App. 18/020,161 (patent)
pi
Son, D., Ugurlu, M., Bluemer, P., Sitti, M.
Magnetic trap system and method of navigating a microscopic device
2023, US Patent App. 17/871,598 (patent)
pi
Sitti, M., Drotlef, D., Liimatainen, V.
A Liquid Repellent Fibrillar Dry Adhesive Material and a Method of Producing the Same
2023, US Patent App. 17/785,452 (patent)
pi
Sitti, M., Son, D., Dong, X.
Simultaneous calibration method for magnetic localization and actuation systems
2023, US Patent 11,717,142 (patent)
pi
M Sitti, M. M. B. A.
Dry adhesives and methods for making dry adhesives
2023, US Patent 11,773,298, 2023 (patent)
2022
pi
Metin Sitti, Michael Murphy, Burak Aksak
DRY ADHESIVES AND METHODS FOR MAKING DRY ADHESIVES
December 2022, US Patent App. 17/895,334, 2022 (patent)
rm
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K., Morrissey, T. G.
Hydraulically Amplified Self-healing Electrostatic Transducers Harnessing Zipping Mechanism
(US Patent 11486421B2), November 2022 (patent)
pf
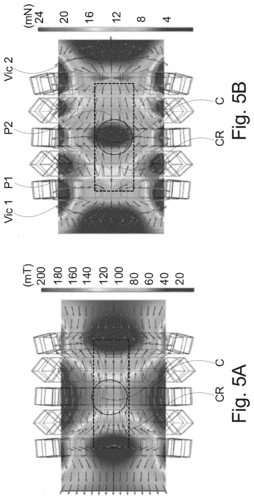
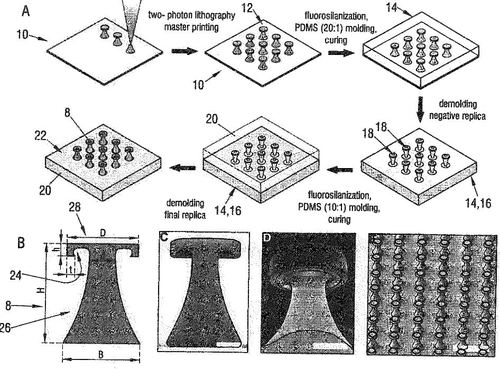
Qiu, T., Jeong, M., Goyal, R., Kadiri, V., Sachs, J., Fischer, P.
Magnetic Micro-/Nanopropellers for Biomedicine
In Field-Driven Micro and Nanorobots for Biology and Medicine, pages: 389-410, 16, (Editors: Sun, Y. and Wang, X. and Yu, J.), Springer, Cham, 2022 (inbook)
re
Lieder, F., Prentice, M.
Life Improvement Science
In Encyclopedia of Quality of Life and Well-Being Research, Springer, November 2022 (inbook)
rm
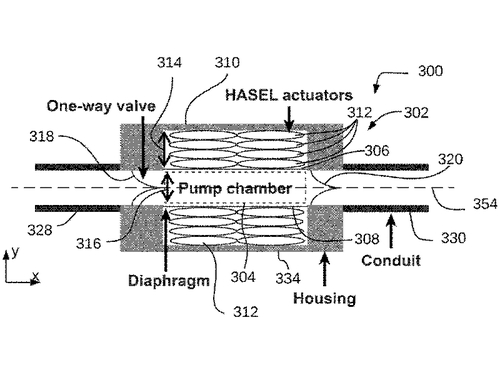
Mitchell, S. K., Acome, E. L., Keplinger, C. M.
Hydraulically Amplified Self-Healing Electrostatic (HASEL) Pumps
(US Patent App. 17/635,339), October 2022 (patent)
ei
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
rm
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K.
Hydraulically Amplified Self-healing Electrostatic Actuators
(US Patent 11408452), August 2022 (patent)
sf
Hardt, M., Recht, B.
Patterns, Predictions, and Actions: Foundations of Machine Learning
Princeton University Press, August 2022 (book)
rm
Keplinger, C. M., Mitchell, S. K., Kellaris, N. A., Rothemund, P.
Composite Layering of Hydraulically Amplified Self-Healing Electrostatic Transducers
(US Patent App. 17436455), May 2022 (patent)
dlg
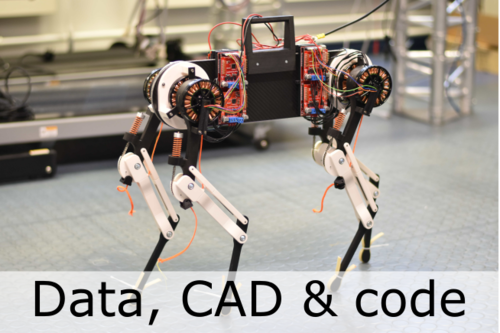
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
dlg
pi
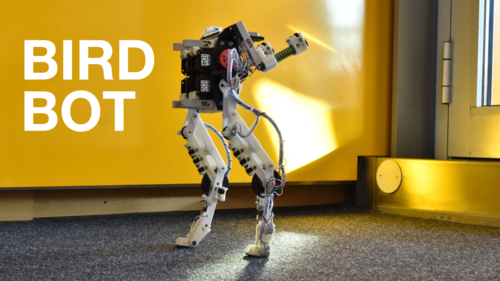
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
ei
Peters, J., Bauer, S., Pfister, N.
Causal Models for Dynamical Systems
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 671-690, 1, Association for Computing Machinery, 2022 (inbook)
ei
plg
Karimi, A. H., von Kügelgen, J., Schölkopf, B., Valera, I.
Towards Causal Algorithmic Recourse
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 139-166, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Salewski, L., Koepke, A. S., Lensch, H. P. A., Akata, Z.
CLEVR-X: A Visual Reasoning Dataset for Natural Language Explanations
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 69-88, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Schölkopf, B.
Causality for Machine Learning
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 765-804, 1, Association for Computing Machinery, New York, NY, USA, 2022 (inbook)
2021
ev
Strecke, M., Stückler, J.
Physically Plausible Tracking & Reconstruction of Dynamic Objects
KIT Science Week Scientific Conference & DGR-Days 2021, October 2021 (talk)
ps
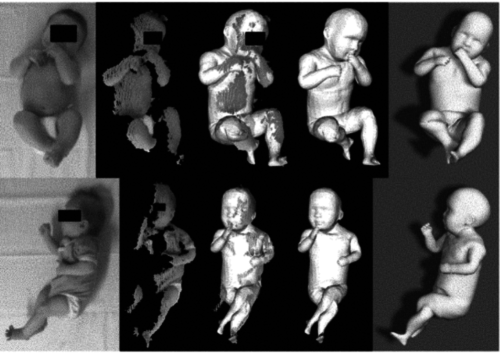
Hesse, N., Pujades, S., Romero, J., Black, M.
Skinned multi-infant linear body model
(US Patent 11,127,163, 2021), September 2021 (patent)
rm
Purnendu, , Novack, S., Acome, E., Alistar, M., Keplinger, C., Gross, M. D., Bruns, C., Leithinger, D.
Electriflow: Augmenting Books With Tangible Animation Using Soft Electrohydraulic Actuators
In ACM SIGGRAPH 2021 Labs, pages: 1-2, Association for Computing Machinery, SIGGRAPH 2021, August 2021 (inbook)
re
Frederic Becker, , Lieder, F.
Promoting metacognitive learning through systematic reflection
The first edition of Life Improvement Science Conference, June 2021 (poster)
re
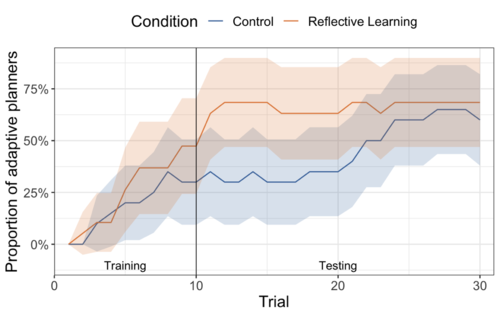
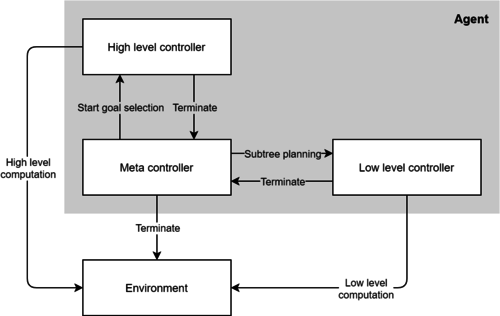
Heindrich, L., Consul, S., Stojcheski, J., Lieder, F.
Improving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Tübingen, Germany, The first edition of Life Improvement Science Conference, June 2021 (talk) Accepted
rm
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K.
Hydraulically amplified self-healing electrostatic actuators
(US Patent 10995779), May 2021 (patent)
re
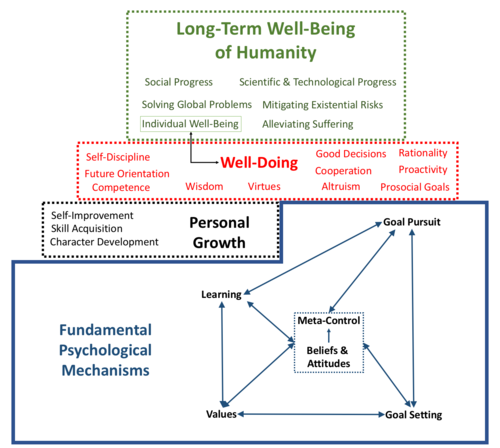
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
rm
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K., Morrissey, T. G.
Hydraulically Amplified Self-Healing Electrostatic Transducers Harnessing Zipping Mechanism
(US Patent 20210003149A1), January 2021 (patent)