
2024
ei
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
ev
Achterhold, J., Guttikonda, S., Kreber, J. U., Li, H., Stueckler, J.
Learning a Terrain- and Robot-Aware Dynamics Model for Autonomous Mobile Robot Navigation
CoRR abs/2409.11452, 2024, Preprint submitted to Robotics and Autonomous Systems Journal. https://arxiv.org/abs/2409.11452 (techreport) Submitted
lds
Eberhard, O., Vernade, C., Muehlebach, M.
A Pontryagin Perspective on Reinforcement Learning
Max Planck Institute for Intelligent Systems, 2024 (techreport)
lds
Er, D., Trimpe, S., Muehlebach, M.
Distributed Event-Based Learning via ADMM
Max Planck Institute for Intelligent Systems, 2024 (techreport)
ev
Baumeister, F., Mack, L., Stueckler, J.
Incremental Few-Shot Adaptation for Non-Prehensile Object Manipulation using Parallelizable Physics Simulators
CoRR abs/2409.13228, CoRR, 2024, Submitted to IEEE International Conference on Robotics and Automation (ICRA) 2025 (techreport) Submitted
2023
dlg
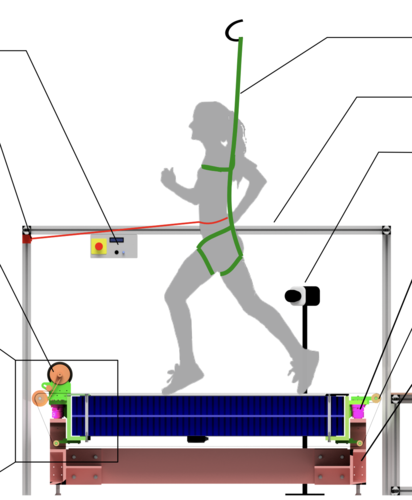
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
ei
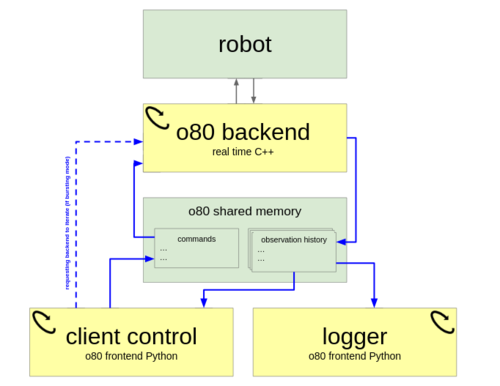
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
dlg
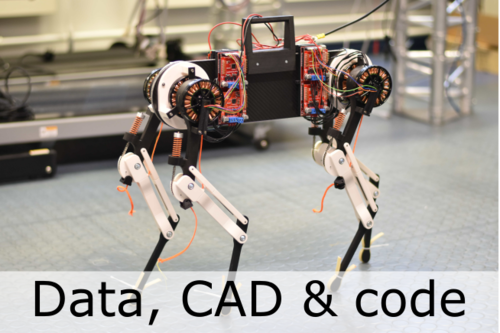
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
dlg
pi
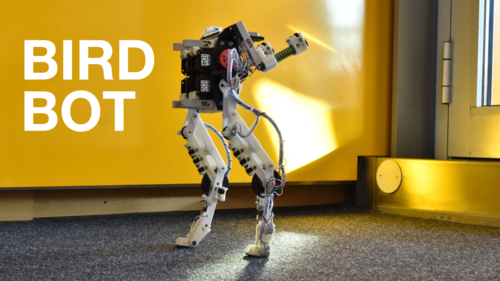
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
2021
re
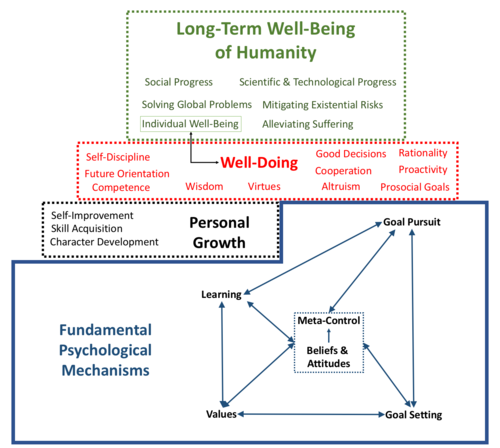
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)

ei
hi
ps
pi
rm
Scientific Report 2016 - 2021
2021 (mpi_year_book)
2020
re
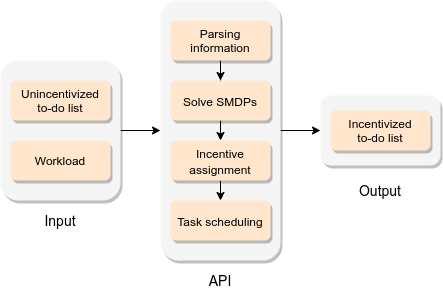
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
ics
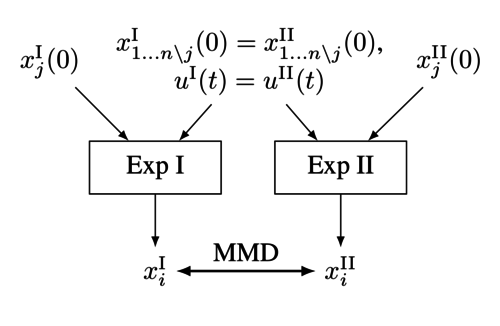
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)

2018
ev
Ma, L., Stueckler, J., Wu, T., Cremers, D.
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform
arxiv, 2018, arXiv:1808.01834 (techreport)
slt
Keriven, N., Garreau, D., Poli, I.
NEWMA: a new method for scalable model-free online change-point detection
2018 (techreport)
pf
Wu, Z., Troll, J., Jeong, H., Qiang, W., Stang, M., Ziemssen, F., Wang, Z., Dong, M., Schnichels, S., Qiu, T., Fischer, P.
Nanorobots propel through the eye
Max Planck Society, 2018 (mpi_year_book)
2016
am
ics
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
am
ics
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
ei
Abbott, T., Abdalla, F. B., Allam, S., Amara, A., Annis, J., Armstrong, R., Bacon, D., Banerji, M., Bauer, A. H., Baxter, E., others,
Cosmology from Cosmic Shear with DES Science Verification Data
arXiv preprint arXiv:1507.05552, 2015 (techreport)
ei
Jarvis, M., Sheldon, E., Zuntz, J., Kacprzak, T., Bridle, S. L., Amara, A., Armstrong, R., Becker, M. R., Bernstein, G. M., Bonnett, C., others,
The DES Science Verification Weak Lensing Shear Catalogs
arXiv preprint arXiv:1507.05603, 2015 (techreport)
2014
ps
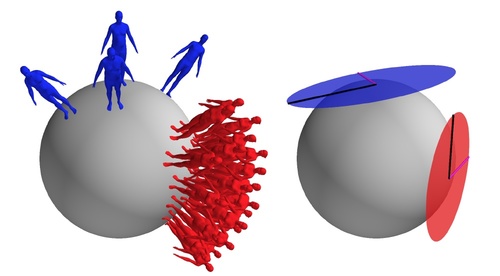
Freifeld, O., Hauberg, S., Black, M. J.
Model transport: towards scalable transfer learning on manifolds - supplemental material
(9), April 2014 (techreport)
2013
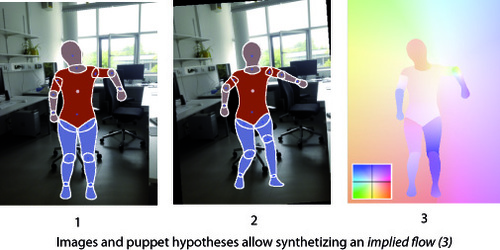
ps
Zuffi, S., Black, M. J.
Puppet Flow
(7), Max Planck Institute for Intelligent Systems, October 2013 (techreport)
am
Sankaran, B., Ghazvininejad, M., He, X., Kale, D., Cohen, L.
Learning and Optimization with Submodular Functions
ArXiv, May 2013 (techreport)

ps
Sun, D., Roth, S., Black, M. J.
A Quantitative Analysis of Current Practices in Optical Flow Estimation and the Principles Behind Them
(CS-10-03), Brown University, Department of Computer Science, January 2013 (techreport)
ei
pn
Hennig, P.
Animating Samples from Gaussian Distributions
(8), Max Planck Institute for Intelligent Systems, Tübingen, Germany, 2013 (techreport)
ei
Hogg, D. W., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Lang, D., Montet, B. T., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Detailed models of the focal plane in the two-wheel era
arXiv:1309.0653, 2013 (techreport)
ei
Montet, B. T., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Hogg, D. W., Lang, D., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Searching the habitable zones of the brightest stars
arXiv:1309.0654, 2013 (techreport)

2012
ps
Hirshberg, D., Loper, M., Rachlin, E., Black, M. J.
Coregistration: Supplemental Material
(No. 4), Max Planck Institute for Intelligent Systems, October 2012 (techreport)

ps
Freifeld, O., Black, M. J.
Lie Bodies: A Manifold Representation of 3D Human Shape. Supplemental Material
(No. 5), Max Planck Institute for Intelligent Systems, October 2012 (techreport)

ps
Butler, D. J., Wulff, J., Stanley, G. B., Black, M. J.
MPI-Sintel Optical Flow Benchmark: Supplemental Material
(No. 6), Max Planck Institute for Intelligent Systems, October 2012 (techreport)
ei
Grosse-Wentrup, M., Schölkopf, B.
High Gamma-Power Predicts Performance in Brain-Computer Interfacing
(3), Max-Planck-Institut für Intelligente Systeme, Tübingen, February 2012 (techreport)
2011
ei
Seldin, Y., Laviolette, F., Shawe-Taylor, J., Peters, J., Auer, P.
PAC-Bayesian Analysis of Martingales and Multiarmed Bandits
Max Planck Institute for Biological Cybernetics, Tübingen, Germany, May 2011 (techreport)
ei
Schuler, C., Hirsch, M., Harmeling, S., Schölkopf, B.
Non-stationary Correction of Optical Aberrations
(1), Max Planck Institute for Intelligent Systems, Tübingen, Germany, May 2011 (techreport)
ei
Nickisch, H., Seeger, M.
Multiple Kernel Learning: A Unifying Probabilistic Viewpoint
Max Planck Institute for Biological Cybernetics, March 2011 (techreport)
ei
Langovoy, M., Wittich, O.
Multiple testing, uncertainty and realistic pictures
(2011-004), EURANDOM, Technische Universiteit Eindhoven, January 2011 (techreport)
ei
Sra, S.
Nonconvex proximal splitting: batch and incremental algorithms
(2), Max Planck Institute for Intelligent Systems, Tübingen, Germany, 2011 (techreport)
2010
ei
Langovoy, M., Wittich, O.
Computationally efficient algorithms for statistical image processing: Implementation in R
(2010-053), EURANDOM, Technische Universiteit Eindhoven, December 2010 (techreport)
ei
Seeger, M., Nickisch, H.
Fast Convergent Algorithms for Expectation Propagation Approximate Bayesian Inference
Max Planck Institute for Biological Cybernetics, December 2010 (techreport)
ei
Seldin, Y.
A PAC-Bayesian Analysis of Graph Clustering and Pairwise Clustering
Max Planck Institute for Biological Cybernetics, Tübingen, Germany, September 2010 (techreport)
ei
Tandon, R., Sra, S.
Sparse nonnegative matrix approximation: new formulations and algorithms
(193), Max Planck Institute for Biological Cybernetics, Tübingen, Germany, September 2010 (techreport)
ei
Langovoy, M., Wittich, O.
Robust nonparametric detection of objects in noisy images
(2010-049), EURANDOM, Technische Universiteit Eindhoven, September 2010 (techreport)
ei
Seeger, M., Nickisch, H.
Large Scale Variational Inference and Experimental Design for Sparse Generalized Linear Models
Max Planck Institute for Biological Cybernetics, August 2010 (techreport)
ei
Jegelka, S., Bilmes, J.
Cooperative Cuts for Image Segmentation
(UWEETR-1020-0003), University of Washington, Washington DC, USA, August 2010 (techreport)
ei
Barbero, A., Sra, S.
Fast algorithms for total-variationbased optimization
(194), Max Planck Institute for Biological Cybernetics, Tübingen, Germany, August 2010 (techreport)
ei
Nickisch, H., Rasmussen, C.
Gaussian Mixture Modeling with Gaussian Process Latent Variable Models
Max Planck Institute for Biological Cybernetics, June 2010 (techreport)
ei
Sra, S.
Generalized Proximity and Projection with Norms and Mixed-norms
(192), Max Planck Institute for Biological Cybernetics, Tübingen, Germany, May 2010 (techreport)
ei
Jegelka, S., Bilmes, J.
Cooperative Cuts: Graph Cuts with Submodular Edge Weights
(189), Max Planck Institute for Biological Cybernetics, Tuebingen, Germany, March 2010 (techreport)