
2024
ei
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ei
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
2023
dlg
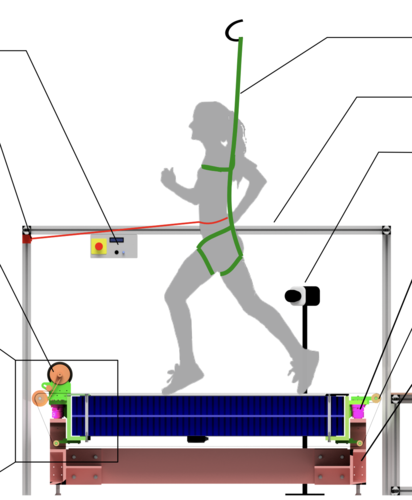
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
2022
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
ei
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
ei
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
2021
ev
Strecke, M., Stückler, J.
Physically Plausible Tracking & Reconstruction of Dynamic Objects
KIT Science Week Scientific Conference & DGR-Days 2021, October 2021 (talk)
ei
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
re
Frederic Becker, , Lieder, F.
Promoting metacognitive learning through systematic reflection
The first edition of Life Improvement Science Conference, June 2021 (poster)
re
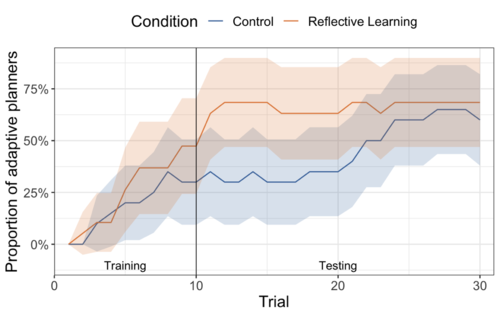
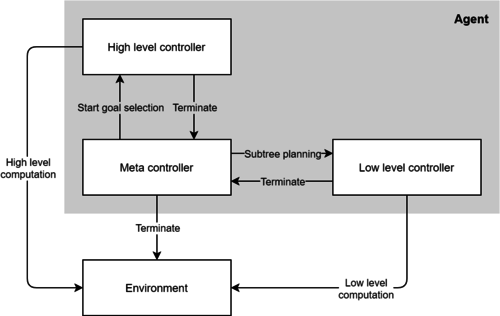
Heindrich, L., Consul, S., Stojcheski, J., Lieder, F.
Improving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Tübingen, Germany, The first edition of Life Improvement Science Conference, June 2021 (talk) Accepted
2020
dlg
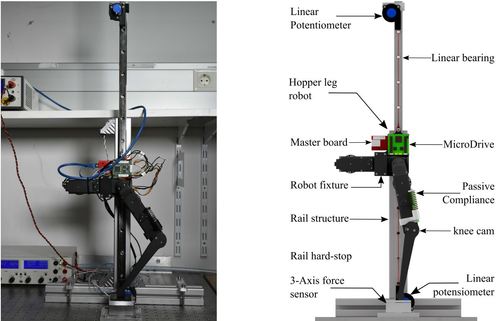
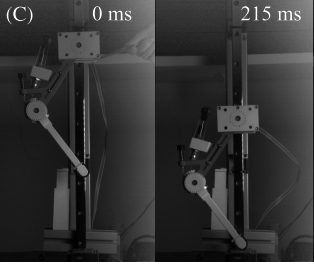
Milad Shafiee Ashtiani, A. A. S., Badri-Sproewitz, A.
Towards Hybrid Active and Passive Compliant Mechanisms in Legged Robots
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2020 (poster) Accepted
dlg
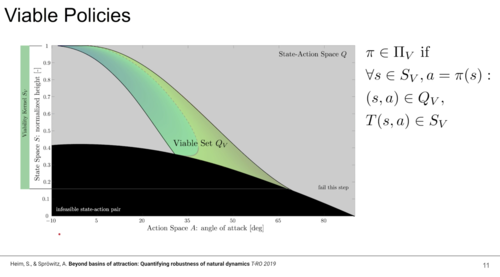
Heim, S., Badri-Spröwitz, A.
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
May 2020 (talk)
dlg
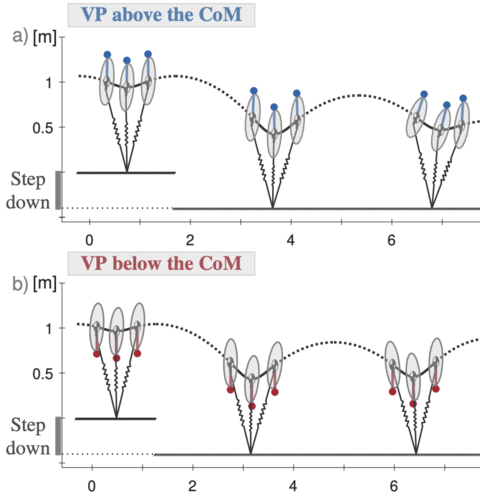
Drama, Ö., Badri-Spröwitz, A.
VP above or below? A new perspective on the story of the virtual point
Dynamic Walking, May 2020 (poster)
dlg
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Viscous Damping in Legged Locomotion
Dynamic Walking, May 2020 (poster)
dlg
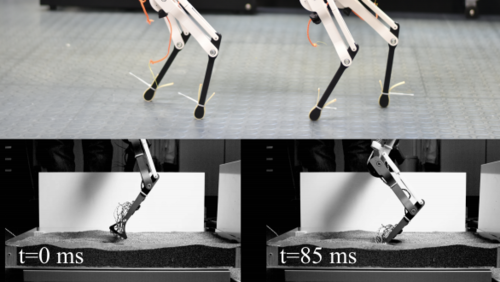
Ruppert, F., Badri-Spröwitz, A.
How Quadrupeds Benefit from Lower Leg Passive Elasticity
Dynamic Walking, May 2020 (poster)
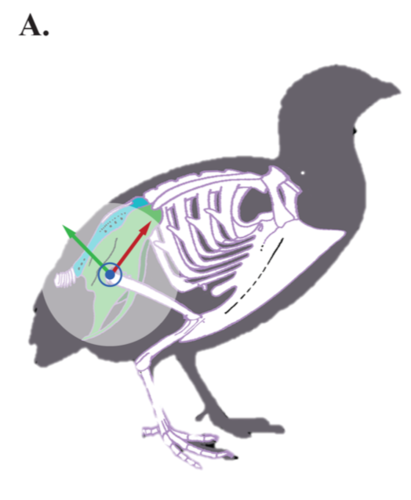
dlg
Kamska, V., Daley, M., Badri-Spröwitz, A.
Potential for elastic soft tissue deformation and mechanosensory function within the lumbosacral spinal canal of birds
Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2020), January 2020 (poster)
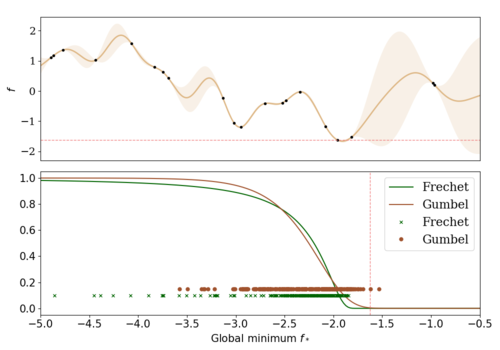
am
ics
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision
2019
ei
Safavi, S., Logothetis, N., Besserve, M.
Multivariate coupling estimation between continuous signals and point processes
Neural Information Processing Systems 2019 - Workshop on Learning with Temporal Point Processes, December 2019 (talk)
ei
Meding, K., Schölkopf, B., Wichmann, F. A.
Perception of temporal dependencies in autoregressive motion
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
ei
Bruijns, S. A., Meding, K., Schölkopf, B., Wichmann, F. A.
Phenomenal Causality and Sensory Realism
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
ei
Shao, K., Logothetis, N., Besserve, M.
Neural mass modeling of the Ponto-Geniculo-Occipital wave and its neuromodulation
28th Annual Computational Neuroscience Meeting (CNS*2019), July 2019 (poster)
ics
Mager, F., Baumann, D., Jacob, R., Thiele, L., Trimpe, S., Zimmerling, M.
Demo Abstract: Fast Feedback Control and Coordination with Mode Changes for Wireless Cyber-Physical Systems
Proceedings of the 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 340-341, 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), April 2019 (poster)
2018
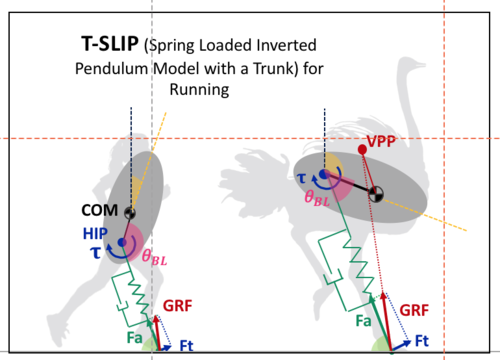
dlg
Drama, Ö.
Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Dynamic Walking Conference, May 2018 (talk)
ics
Mager, F., Baumann, D., Trimpe, S., Zimmerling, M.
Poster Abstract: Toward Fast Closed-loop Control over Multi-hop Low-power Wireless Networks
Proceedings of the 17th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 158-159, Porto, Portugal, April 2018 (poster)
ei
Goris, R., Henaff, O., Meding, K.
Representation of sensory uncertainty in macaque visual cortex
Computational and Systems Neuroscience (COSYNE) 2018, March 2018 (poster)
ei
Safavi, S., Panagiotaropoulos, T., Kapoor, V., Logothetis, N. K., Besserve, M.
Generalized phase locking analysis of electrophysiology data
7th AREADNE Conference on Research in Encoding and Decoding of Neural Ensembles, 2018 (poster)
ei
Pérez-Pellitero, E., Sajjadi, M. S. M., Hirsch, M., Schölkopf, B.
Photorealistic Video Super Resolution
Workshop and Challenge on Perceptual Image Restoration and Manipulation (PIRM) at the 15th European Conference on Computer Vision (ECCV), 2018 (poster)
ei
Meding, K., Hirsch, M., Wichmann, F. A.
Retinal image quality of the human eye across the visual field
14th Biannual Conference of the German Society for Cognitive Science (KOGWIS 2018), 2018 (poster)
2017
ei
Aghaeifar, A., Loktyushin, A., Eschelbach, M., Scheffler, K.
Improving performance of linear field generation with multi-coil setup by optimizing coils position
Magnetic Resonance Materials in Physics, Biology and Medicine, 30(Supplement 1):S259, 34th Annual Scientific Meeting of the European Society for Magnetic Resonance in Medicine and Biology (ESMRMB), October 2017 (poster)
ei
Loktyushin, A., Ehses, P., Schölkopf, B., Scheffler, K.
Estimating B0 inhomogeneities with projection FID navigator readouts
25th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), April 2017 (poster)
ei
Feng, X., Loktyushin, A., Deistung, A., Reichenbach, J.
Image Quality Improvement by Applying Retrospective Motion Correction on Quantitative Susceptibility Mapping and R2*
25th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), April 2017 (poster)
ei
Safavi, S., Panagiotaropoulos, T., Kapoor, V., Logothetis, N. K., Besserve, M.
Generalized phase locking analysis of electrophysiology data
ESI Systems Neuroscience Conference (ESI-SyNC 2017): Principles of Structural and Functional Connectivity, 2017 (poster)
2016
ei
Ihler, A. T., Janzing, D.
Proceedings of the 32nd Conference on Uncertainty in Artificial Intelligence (UAI)
pages: 869 pages, AUAI Press, June 2016 (proceedings)
ei
Loktyushin, A., Ehses, P., Schölkopf, B., Scheffler, K.
Autofocusing-based correction of B0 fluctuation-induced ghosting
24th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), May 2016 (poster)
am
Oh, Y., Sutanto, G., Mistry, M., Schweighofer, N., Schaal, S.
Distinct adaptation to abrupt and gradual torque perturbations with a multi-joint exoskeleton robot
Abstracts of Neural Control of Movement Conference (NCM 2016), Montego Bay, Jamaica, April 2016 (poster)
ei
Logothetis, N. K., Murayama, Y., Ramirez-Villegas, J. F., Besserve, M., Evrard, H.
PGO wave-triggered functional MRI: mapping the networks underlying synaptic consolidation
47th Annual Meeting of the Society for Neuroscience (Neuroscience), 2016 (poster)
ei
Ramirez-Villegas, J. F., Logothetis, N. K., Besserve, M.
Statistical source separation of rhythmic LFP patterns during sharp wave ripples in the macaque hippocampus
47th Annual Meeting of the Society for Neuroscience (Neuroscience), 2016 (poster)
ei
Besserve, M., Logothetis, N. K.
Hippocampal neural events predict ongoing brain-wide BOLD activity
47th Annual Meeting of the Society for Neuroscience (Neuroscience), 2016 (poster)
2015
ei
Ramirez-Villegas, J. F., Logothetis, N. K., Besserve, M.
Diversity of sharp wave-ripples in the CA1 of the macaque hippocampus and their brain wide signatures
45th Annual Meeting of the Society for Neuroscience (Neuroscience 2015), October 2015 (poster)

ps
Gall, J., Gehler, P., Leibe, B.
Proceedings of the 37th German Conference on Pattern Recognition
Springer, German Conference on Pattern Recognition, October 2015 (proceedings)
ei
Besserve, M.
Causal Inference for Empirical Time Series Based on the Postulate of Independence of Cause and Mechanism
53rd Annual Allerton Conference on Communication, Control, and Computing, September 2015 (talk)
ei
Loktyushin, A., Babayeva, M., Gallichan, D., Krueger, G., Scheffler, K., Kober, T.
Retrospective rigid motion correction of undersampled MRI data
23rd Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine, ISMRM, June 2015 (poster)
ei
Feng, X., Loktyushin, A., Deistung, A., Reichenbach, J. R.
Improving Quantitative Susceptibility and R2* Mapping by Applying Retrospective Motion Correction
23rd Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine, ISMRM, June 2015 (poster)
ei
Besserve, M.
Independence of cause and mechanism in brain networks
DALI workshop on Networks: Processes and Causality, April 2015 (talk)
ei
Foreman-Mackey, D., Hogg, D., Schölkopf, B., Wang, D.
Increasing the sensitivity of Kepler to Earth-like exoplanets
Workshop: 225th American Astronomical Society Meeting 2015 , pages: 105.01D, 2015 (poster)
ei
Chaves, R., Majenz, C., Luft, L., Maciel, T., Janzing, D., Schölkopf, B., Gross, D.
Information-Theoretic Implications of Classical and Quantum Causal Structures
18th Conference on Quantum Information Processing (QIP), 2015 (talk)
ei
Wang, D., Foreman-Mackey, D., Hogg, D., Schölkopf, B.
Calibrating the pixel-level Kepler imaging data with a causal data-driven model
Workshop: 225th American Astronomical Society Meeting 2015 , pages: 258.08, 2015 (poster)
ei
Foreman-Mackey, D., Hogg, D. W., Schölkopf, B.
The search for single exoplanet transits in the Kepler light curves
IAU General Assembly, 22, pages: 2258352, 2015 (talk)
ei
Köhler, R., Schölkopf, B., Hirsch, M.
Disparity estimation from a generative light field model
IEEE International Conference on Computer Vision (ICCV 2015), Workshop on Inverse Rendering, 2015, Note: This work has been presented as a poster and is not included in the workshop proceedings. (poster)