
2024
ei
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
ev
Achterhold, J., Guttikonda, S., Kreber, J. U., Li, H., Stueckler, J.
Learning a Terrain- and Robot-Aware Dynamics Model for Autonomous Mobile Robot Navigation
CoRR abs/2409.11452, 2024, Preprint submitted to Robotics and Autonomous Systems Journal. https://arxiv.org/abs/2409.11452 (techreport) Submitted
lds
Eberhard, O., Vernade, C., Muehlebach, M.
A Pontryagin Perspective on Reinforcement Learning
Max Planck Institute for Intelligent Systems, 2024 (techreport)
lds
Er, D., Trimpe, S., Muehlebach, M.
Distributed Event-Based Learning via ADMM
Max Planck Institute for Intelligent Systems, 2024 (techreport)
ev
Baumeister, F., Mack, L., Stueckler, J.
Incremental Few-Shot Adaptation for Non-Prehensile Object Manipulation using Parallelizable Physics Simulators
CoRR abs/2409.13228, CoRR, 2024, Submitted to IEEE International Conference on Robotics and Automation (ICRA) 2025 (techreport) Submitted

2023
sf
Barocas, S., Hardt, M., Narayanan, A.
Fairness in Machine Learning: Limitations and Opportunities
MIT Press, December 2023 (book)
ei
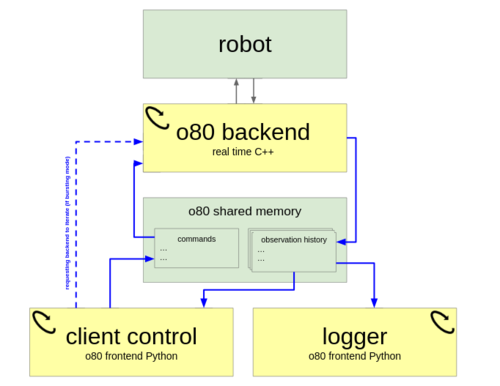
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
ei
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
sf
Hardt, M., Recht, B.
Patterns, Predictions, and Actions: Foundations of Machine Learning
Princeton University Press, August 2022 (book)
dlg
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
dlg
pi
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
2021
ev
Strecke, M., Stückler, J.
Physically Plausible Tracking & Reconstruction of Dynamic Objects
KIT Science Week Scientific Conference & DGR-Days 2021, October 2021 (talk)
re
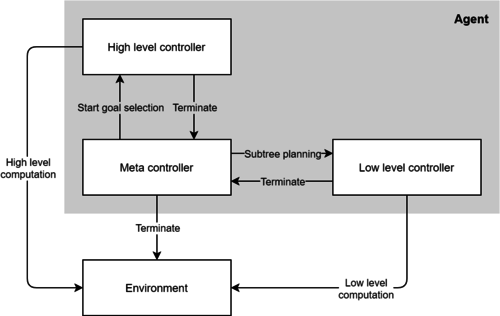
Heindrich, L., Consul, S., Stojcheski, J., Lieder, F.
Improving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Tübingen, Germany, The first edition of Life Improvement Science Conference, June 2021 (talk) Accepted
re
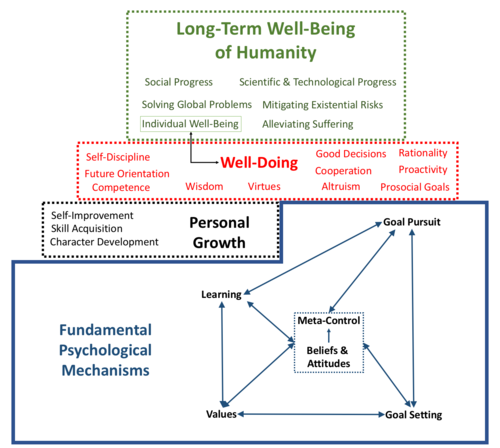
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
ei
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)

ei
hi
ps
pi
rm
Scientific Report 2016 - 2021
2021 (mpi_year_book)
2020
re
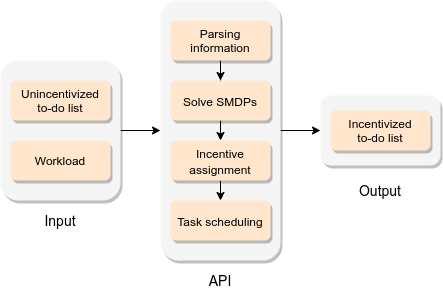
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
dlg
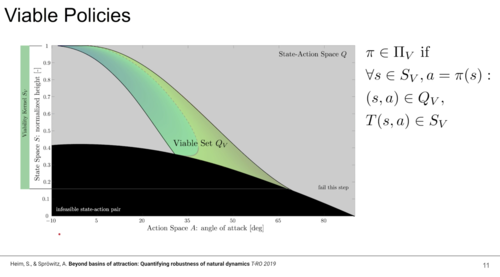
Heim, S., Badri-Spröwitz, A.
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
May 2020 (talk)
ics
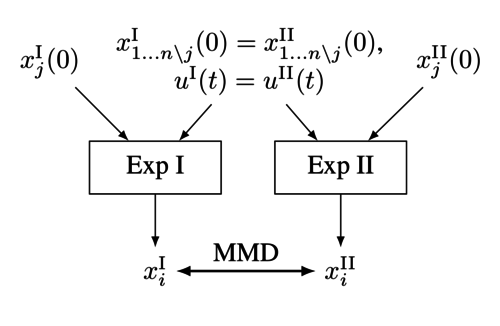
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)

avg
Janai, J., Güney, F., Behl, A., Geiger, A.
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
12(1-3), Foundations and Trends® in Computer Graphics and Vision, now Publishers Inc., Hanover, MA, 2020 (book)
2019
ei
Safavi, S., Logothetis, N., Besserve, M.
Multivariate coupling estimation between continuous signals and point processes
Neural Information Processing Systems 2019 - Workshop on Learning with Temporal Point Processes, December 2019 (talk)

ei
hi
ps
pi
Scientific Report 2016 - 2018
2019 (mpi_year_book)
mms
Keskinbora, K.
Prototyping Micro- and Nano-Optics with Focused Ion Beam Lithography
SL48, pages: 46, SPIE.Spotlight, SPIE Press, Bellingham, WA, 2019 (book)
2018
dlg
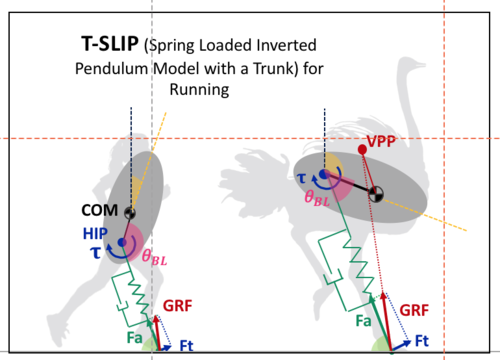
Drama, Ö.
Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Dynamic Walking Conference, May 2018 (talk)
ev
Ma, L., Stueckler, J., Wu, T., Cremers, D.
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform
arxiv, 2018, arXiv:1808.01834 (techreport)
slt
Keriven, N., Garreau, D., Poli, I.
NEWMA: a new method for scalable model-free online change-point detection
2018 (techreport)
pf
Wu, Z., Troll, J., Jeong, H., Qiang, W., Stang, M., Ziemssen, F., Wang, Z., Dong, M., Schnichels, S., Qiu, T., Fischer, P.
Nanorobots propel through the eye
Max Planck Society, 2018 (mpi_year_book)
2017
ei
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
pi
Sitti, M.
Mobile Microrobotics
Mobile Microrobotics, The MIT Press, Cambridge, MA, 2017 (book)
2016
am
ics
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
am
ics
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
ei
Besserve, M.
Causal Inference for Empirical Time Series Based on the Postulate of Independence of Cause and Mechanism
53rd Annual Allerton Conference on Communication, Control, and Computing, September 2015 (talk)
ei
Besserve, M.
Independence of cause and mechanism in brain networks
DALI workshop on Networks: Processes and Causality, April 2015 (talk)
ei
Chaves, R., Majenz, C., Luft, L., Maciel, T., Janzing, D., Schölkopf, B., Gross, D.
Information-Theoretic Implications of Classical and Quantum Causal Structures
18th Conference on Quantum Information Processing (QIP), 2015 (talk)
ei
Abbott, T., Abdalla, F. B., Allam, S., Amara, A., Annis, J., Armstrong, R., Bacon, D., Banerji, M., Bauer, A. H., Baxter, E., others,
Cosmology from Cosmic Shear with DES Science Verification Data
arXiv preprint arXiv:1507.05552, 2015 (techreport)
ei
Jarvis, M., Sheldon, E., Zuntz, J., Kacprzak, T., Bridle, S. L., Amara, A., Armstrong, R., Becker, M. R., Bernstein, G. M., Bonnett, C., others,
The DES Science Verification Weak Lensing Shear Catalogs
arXiv preprint arXiv:1507.05603, 2015 (techreport)
ei
Foreman-Mackey, D., Hogg, D. W., Schölkopf, B.
The search for single exoplanet transits in the Kepler light curves
IAU General Assembly, 22, pages: 2258352, 2015 (talk)

2014
ps
Nowozin, S., Gehler, P. V., Jancsary, J., Lampert, C. H.
Advanced Structured Prediction
Advanced Structured Prediction, pages: 432, Neural Information Processing Series, MIT Press, November 2014 (book)
ps
Freifeld, O., Hauberg, S., Black, M. J.
Model transport: towards scalable transfer learning on manifolds - supplemental material
(9), April 2014 (techreport)
ei
Kober, J., Peters, J.
Learning Motor Skills: From Algorithms to Robot Experiments
97, pages: 191, Springer Tracts in Advanced Robotics, Springer, 2014 (book)
ei
Besserve, M., Schölkopf, B., Logothetis, N. K.
Unsupervised identification of neural events in local field potentials
44th Annual Meeting of the Society for Neuroscience (Neuroscience), 2014 (talk)
ei
Besserve, M.
Quantifying statistical dependency
Research Network on Learning Systems Summer School, 2014 (talk)
ei
Janzing, D.
Causal Inference from Passive Observations
24th Summer School University of Jyväskylā, Finland, August, 2014 (talk)
2013
ps
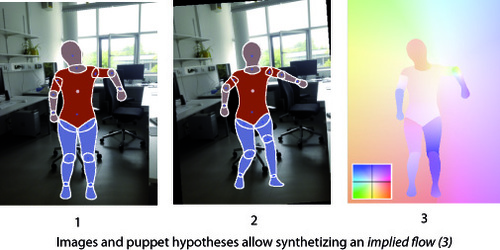
Zuffi, S., Black, M. J.
Puppet Flow
(7), Max Planck Institute for Intelligent Systems, October 2013 (techreport)
ei
Logothetis, N., Eschenko, O., Murayama, Y., Augath, M., Steudel, T., Evrard, H., Besserve, M., Oeltermann, A.
Studying large-scale brain networks: electrical stimulation and neural-event-triggered fMRI
Twenty-Second Annual Computational Neuroscience Meeting (CNS*2013), July 2013, journal = {BMC Neuroscience},
year = {2013},
month = {7},
volume = {14},
number = {Supplement 1},
pages = {A1}, (talk)
am
Sankaran, B., Ghazvininejad, M., He, X., Kale, D., Cohen, L.
Learning and Optimization with Submodular Functions
ArXiv, May 2013 (techreport)

ps
Sun, D., Roth, S., Black, M. J.
A Quantitative Analysis of Current Practices in Optical Flow Estimation and the Principles Behind Them
(CS-10-03), Brown University, Department of Computer Science, January 2013 (techreport)