
2024
ei
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ei
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
2023
ei
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
rm
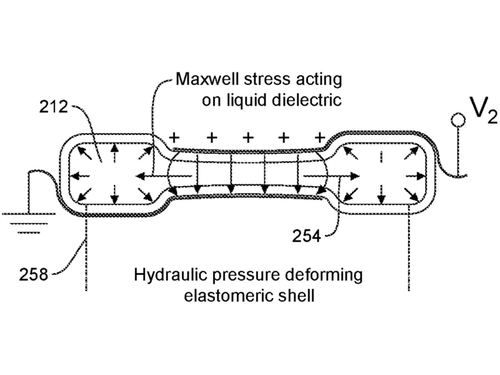
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K.
Hydraulically Amplified Self-healing Electrostatic Actuators
(US Patent 11795979B2), October 2023 (patent)
rm
Keplinger, C. M., Wang, X., Mitchell, S. K.
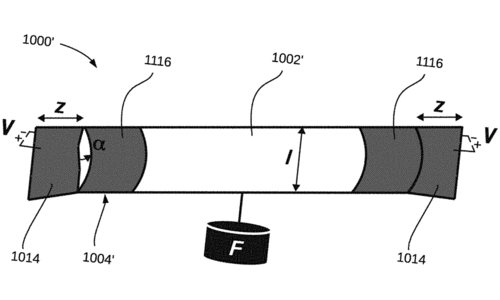
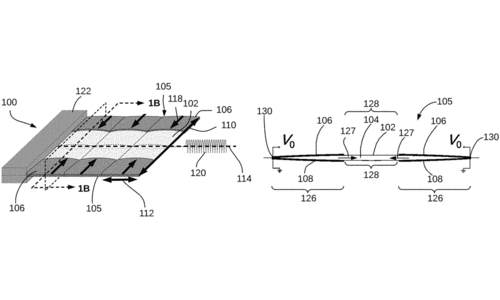
High Strain Peano Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers
(US Patent App. 18/138,621), August 2023 (patent)
rm
Correll, N., Ly, K. D., Kellaris, N. A., Keplinger, C. M.
Capacitive Self-Sensing for Electrostatic Transducers with High Voltage Isolation
(US Patent App. 17/928,453), June 2023 (patent)
rm
Keplinger, C. M., Wang, X., Mitchell, S. K.
High Strain Peano Hydraulically Amplified Self-healing Electrostatic (HASEL) Transducers
(US Patent 11635094), April 2023 (patent)
pi
Wang, T., Hu, W., Sitti, M.
Tube-shaped robotic device with anisotropic surface structure
2023, US Patent App. 18/133,104 (patent)
pi
Drotlef, D., Sitti, M., Amjadi, M.
Carrier, use of a carrier, method of activating a carrier and method of making a carrier
2023, US Patent App. 16/500,442 (patent)
pi
Sitti, M., Aksak, B.
Microfibers with mushroom-shaped tips for optimal adhesion
2023, US Patent 11,613,674 (patent)
pi
Zhang, J., Ren, Z., Hu, W., Sitti, M.
Method of fabricating a magnetic deformable machine and deformable 3D magnetic machine
2023, US Patent App. 18/020,161 (patent)
pi
Son, D., Ugurlu, M., Bluemer, P., Sitti, M.
Magnetic trap system and method of navigating a microscopic device
2023, US Patent App. 17/871,598 (patent)
pi
Sitti, M., Drotlef, D., Liimatainen, V.
A Liquid Repellent Fibrillar Dry Adhesive Material and a Method of Producing the Same
2023, US Patent App. 17/785,452 (patent)
pi
Sitti, M., Son, D., Dong, X.
Simultaneous calibration method for magnetic localization and actuation systems
2023, US Patent 11,717,142 (patent)
pi
M Sitti, M. M. B. A.
Dry adhesives and methods for making dry adhesives
2023, US Patent 11,773,298, 2023 (patent)
2022
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
pi
Metin Sitti, Michael Murphy, Burak Aksak
DRY ADHESIVES AND METHODS FOR MAKING DRY ADHESIVES
December 2022, US Patent App. 17/895,334, 2022 (patent)
rm
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K., Morrissey, T. G.
Hydraulically Amplified Self-healing Electrostatic Transducers Harnessing Zipping Mechanism
(US Patent 11486421B2), November 2022 (patent)
rm
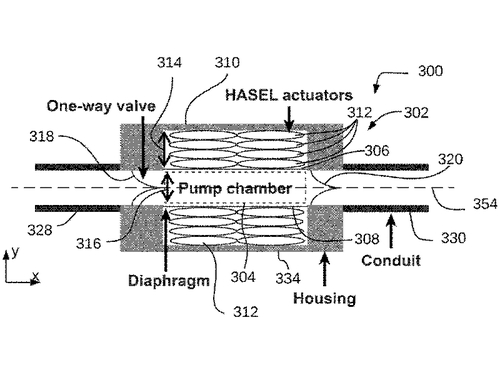
Mitchell, S. K., Acome, E. L., Keplinger, C. M.
Hydraulically Amplified Self-Healing Electrostatic (HASEL) Pumps
(US Patent App. 17/635,339), October 2022 (patent)
rm
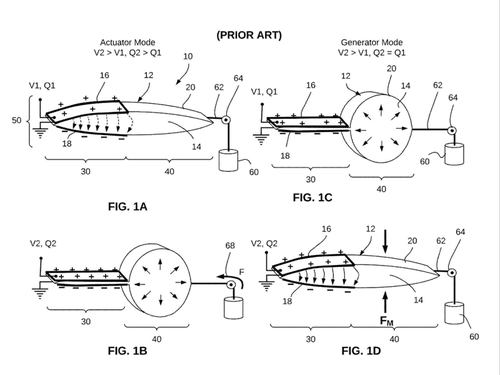
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K.
Hydraulically Amplified Self-healing Electrostatic Actuators
(US Patent 11408452), August 2022 (patent)
rm
Keplinger, C. M., Mitchell, S. K., Kellaris, N. A., Rothemund, P.
Composite Layering of Hydraulically Amplified Self-Healing Electrostatic Transducers
(US Patent App. 17436455), May 2022 (patent)
ei
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
2021
ps
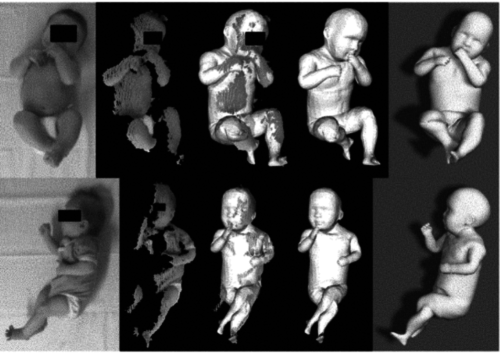
Hesse, N., Pujades, S., Romero, J., Black, M.
Skinned multi-infant linear body model
(US Patent 11,127,163, 2021), September 2021 (patent)
ei
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
re
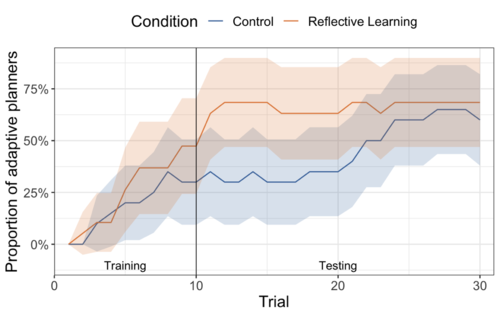
Frederic Becker, , Lieder, F.
Promoting metacognitive learning through systematic reflection
The first edition of Life Improvement Science Conference, June 2021 (poster)
rm
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K., Morrissey, T. G.
Hydraulically Amplified Self-Healing Electrostatic Transducers Harnessing Zipping Mechanism
(US Patent 20210003149A1), January 2021 (patent)
al
hi
Sun, H., Martius, G., Kuchenbecker, K. J.
Sensor Arrangement for Sensing Forces and Methods for Fabricating a Sensor Arrangement and Parts Thereof
(PCT/EP2021/050230), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
al
hi
Sun, H., Martius, G., Kuchenbecker, K. J.
Method for force inference, method for training a feed-forward neural network, force inference module, and sensor arrangement
(PCT/EP2021/050231), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
pi
Sitti, M., Son, D.
Magnetically actuated capsule endoscope, magnetic field generating and sensing apparatus and method of actuating a magnetically actuated capsule endoscope
2021, US Patent App. 16/617,348 (patent)
pf
Wu, Z., Qiu, T., Fischer, P.
Slippery micropropellers penetrate the vitreous humor
(US20210170056A1), 2021 (patent)
pi
Sitti, M., Son, D., Bluemler, P.
Magnetic trap system and method of navigating a microscopic device
2021, EP Prio. Patent App. 21 187 691.7 (patent)
pi
Sitti, M., Zhang, J., Ren, Z., Hu, W.
Three-dimensional assembly based microfabrication strategy for magnetic soft machines
2021, International App. PCT/EP2021/071716 (patent)
pf
Qiu, T., Fischer, P.
Magnetic field generator
(US20210228298A1), 2021 (patent)
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
pi
Sitti, M., Alapan, Y., Karacakol, A.
Heat assisted magnetic programming of soft materials
2021, International App. PCT/EP2021/060313 (patent)
pi
Sitti, M., Bozuyuk, U., Ceylan, H., Yasa, O., Yasa, I. C.
Light-triggered Drug Release from 3D-printed Magnetic Chitosan Microswimmers
2021, US Patent App. 17/274215, Feb.2021 (patent)

ei
hi
ps
pi
rm
Scientific Report 2016 - 2021
2021 (mpi_year_book)
2020
mms
Nacke, R.
Voltage dependent interfacial magnetism in multilayer systems
Universität Stuttgart, Stuttgart, December 2020 (thesis)
hi
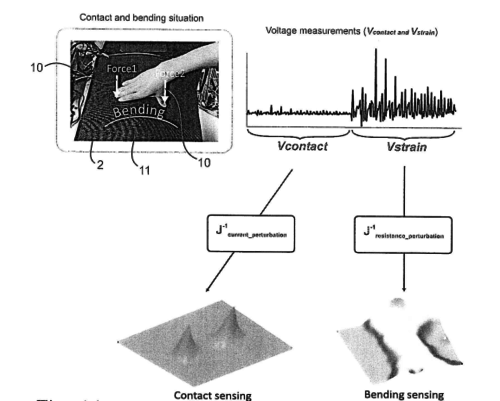
Lee, H., Kuchenbecker, K. J.
System and Method for Simultaneously Sensing Contact Force and Lateral Strain
(EP20000480.2), December 2020 (patent)
al
hi
zwe-rob
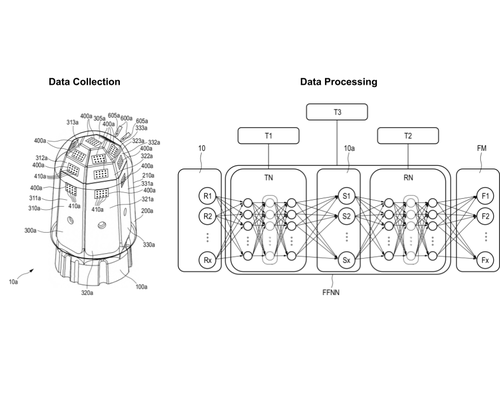
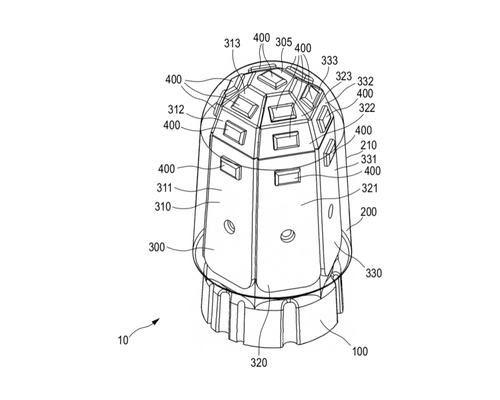
Sun, H., Martius, G., Lee, H., Spiers, A., Fiene, J.
Method for Force Inference of a Sensor Arrangement, Methods for Training Networks, Force Inference Module and Sensor Arrangement
(PCT/EP2020/083261), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, November 2020 (patent)
al
hi
zwe-rob
Spiers, A., Sun, H., Lee, H., Martius, G., Fiene, J., Seo, W. H.
Sensor Arrangement for Sensing Forces and Method for Farbricating a Sensor Arrangement
(PCT/EP2020/083260), November 2020 (patent)
dlg
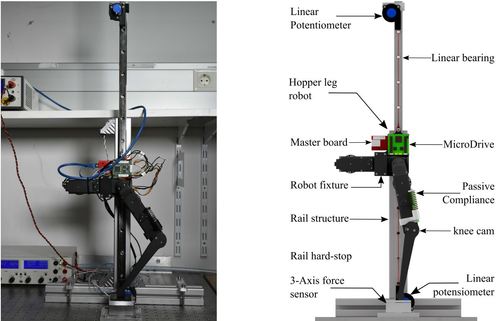
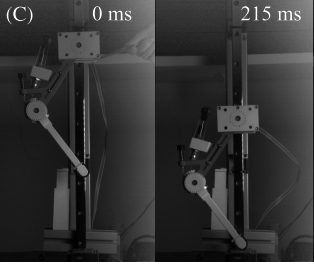
Milad Shafiee Ashtiani, A. A. S., Badri-Sproewitz, A.
Towards Hybrid Active and Passive Compliant Mechanisms in Legged Robots
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2020 (poster) Accepted
ps
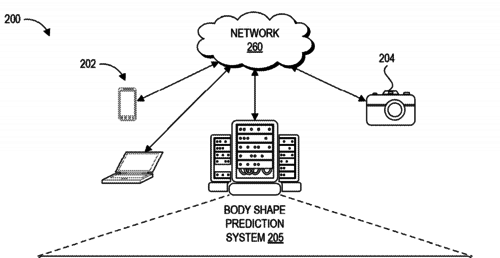
Black, M., Rachlin, E., Heron, N., Loper, M., Weiss, A., Hu, K., Hinkle, T., Kristiansen, M.
Machine learning systems and methods of estimating body shape from images
(US Patent 10,679,046), June 2020 (patent)
dlg
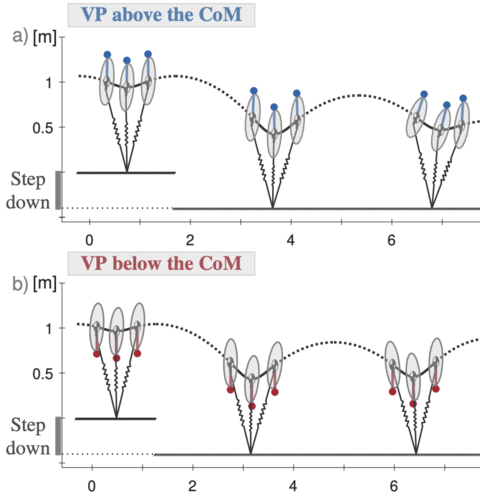
Drama, Ö., Badri-Spröwitz, A.
VP above or below? A new perspective on the story of the virtual point
Dynamic Walking, May 2020 (poster)
dlg
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Viscous Damping in Legged Locomotion
Dynamic Walking, May 2020 (poster)
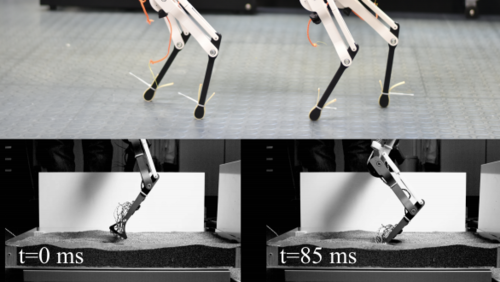
dlg
Ruppert, F., Badri-Spröwitz, A.
How Quadrupeds Benefit from Lower Leg Passive Elasticity
Dynamic Walking, May 2020 (poster)
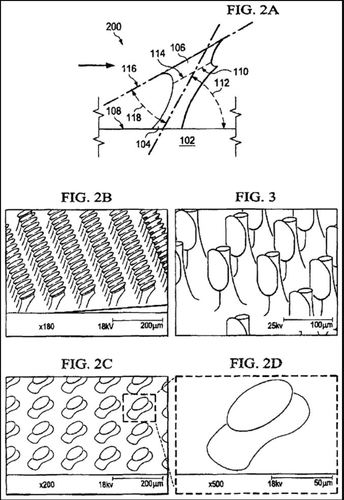
pi
Castillo, L., Aksak, B., Sitti, M.
Fibrillar structures to reduce viscous drag on aerodynamic and hydrodynamic wall surfaces
2020, US Patent 10,830,261 (patent)
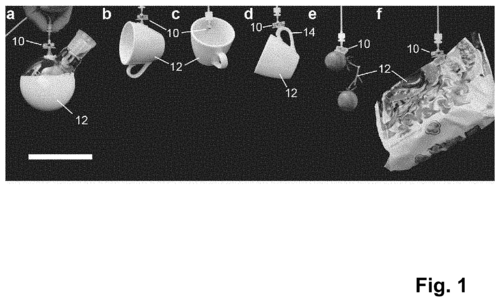
pi
Song, S., Sitti, M., Drotlef, D., Majidi, C.
Gripping apparatus and method of producing a gripping apparatus
Google Patents, February 2020, US Patent App. 16/610,209 (patent)
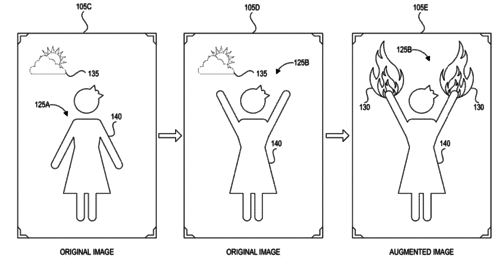
ps
Black, M., Rachlin, E., Lee, E., Heron, N., Loper, M., Weiss, A., Smith, D.
Machine learning systems and methods for augmenting images
(US Patent 10,529,137 B1), January 2020 (patent)