
2023
sf
Barocas, S., Hardt, M., Narayanan, A.
Fairness in Machine Learning: Limitations and Opportunities
MIT Press, December 2023 (book)

ei
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
dlg
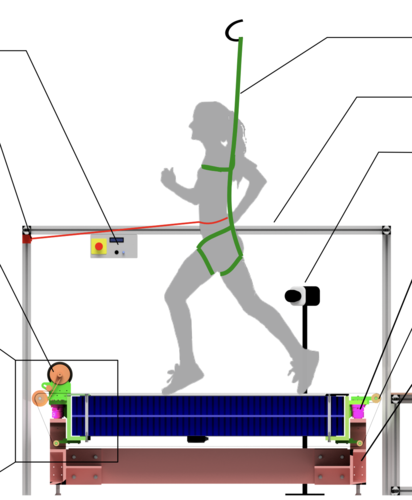
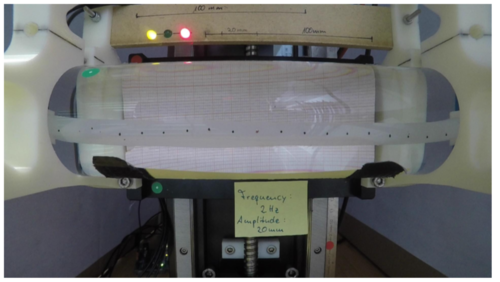
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
2022
sf
Hardt, M., Recht, B.
Patterns, Predictions, and Actions: Foundations of Machine Learning
Princeton University Press, August 2022 (book)
2021
ei
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)
2020
mms
Nacke, R.
Voltage dependent interfacial magnetism in multilayer systems
Universität Stuttgart, Stuttgart, December 2020 (thesis)
icm
Dertli, Denis
Nichtgleichgewichtsdynamik einer abgekühlten kritischen Flüssigkeit mit Oberflächenfeldern unterschiedlichen Vorzeichens
Universität Stuttgart, Stuttgart, January 2020 (thesis)

avg
Janai, J., Güney, F., Behl, A., Geiger, A.
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
12(1-3), Foundations and Trends® in Computer Graphics and Vision, now Publishers Inc., Hanover, MA, 2020 (book)
2019
ei
Lutz, P.
Automatic Segmentation and Labelling for Robot Table Tennis Time Series
Technical University Darmstadt, Germany, August 2019 (thesis)
icm
Pranjić, Daniel
Fluctuating interface with a pinning potential
Universität Stuttgart, Stuttgart, 2019 (thesis)
mms
Keskinbora, K.
Prototyping Micro- and Nano-Optics with Focused Ion Beam Lithography
SL48, pages: 46, SPIE.Spotlight, SPIE Press, Bellingham, WA, 2019 (book)
icm
Beyer, David Bernhard
Controlling pattern formation in the confined Schnakenberg model
Universität Stuttgart, Stuttgart, 2019 (thesis)

pf
Itzigehl, Selina
HPLC separation of ligand-exchanged gold clusters with atomic precision
Univ. of Stuttgart, 2019 (thesis)
2018
dlg
Richter, J.
Untersuchung und Charakterisierung von Teilelementen der Modifikation im Lumbosacralbereich von Vögeln
Hochschule Harz, 2018 (thesis)
icm
Maihöfer, Michael
Pattern forming systems under confinement
Universität Stuttgart, Stuttgart, 2018 (thesis)
icm
Bebon, Rick
Electrostatic interaction between colloids with constant surface potentials at fluid interfaces
Universität Stuttgart, Stuttgart, 2018 (thesis)
icm
Wilke, Moritz
Non-equilibrium dynamics of a binary solvent around heated colloidal particles
Universität Stuttgart, Stuttgart, 2018 (thesis)
icm
Meiler, Tim
Monte Carlo study of colloidal structure formation at fluid interfaces
Universität Stuttgart, Stuttgart, 2018 (thesis)

pf
Hornberger, Lea-Sophie
DNA-linked gold nanoclusters
Univ. of Stuttgart, 2018 (thesis)
icm
Sattler, Alexander
Surface structure of liquid crystals
Universität Stuttgart, Stuttgart, 2018 (thesis)

pf
Vogt, Pascal
HPLC-Trennung von Gold-clustern
Univ. of Stuttgart, 2018 (thesis)
2017
ei
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
icm
Hölzl, Christian
Non-equilibrium forces after temperature quenches in ideal fluids with conserved density
Universität Stuttgart, Stuttgart, 2017 (thesis)

pf
Troll, Jonas
Enzyme activity and transport in biological media
Univ. of Stuttgart, 2017 (thesis)
pi
Sitti, M.
Mobile Microrobotics
Mobile Microrobotics, The MIT Press, Cambridge, MA, 2017 (book)

pf
Segreto, Nico
Propulsion of magnetic colloids at low Reynolds number
Univ. of Stuttgart, 2017 (thesis)
zwe-sw
Bramlage, L.
Design of a visualization scheme for functional connectivity data of Human Brain
Hochschule Osnabrück - University of Applied Sciences, 2017 (thesis)
icm
Schmetzer, Timo
Electrostatic interaction between non-identical charged particles at an electrolyte interface
Universität Stuttgart, Stuttgart, 2017 (thesis)
2015
am
ics
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)

2014
ps
Nowozin, S., Gehler, P. V., Jancsary, J., Lampert, C. H.
Advanced Structured Prediction
Advanced Structured Prediction, pages: 432, Neural Information Processing Series, MIT Press, November 2014 (book)
ei
Kober, J., Peters, J.
Learning Motor Skills: From Algorithms to Robot Experiments
97, pages: 191, Springer Tracts in Advanced Robotics, Springer, 2014 (book)
ei
Schmeißer, N.
Development of advanced methods for improving astronomical images
Eberhard Karls Universität Tübingen, Germany, Eberhard Karls Universität Tübingen, Germany, 2014 (diplomathesis)
2013
ei
pn
Schober, M.
Camera-specific Image Denoising
Eberhard Karls Universität Tübingen, Germany, October 2013 (diplomathesis)
ei
Schölkopf, B., Luo, Z., Vovk, V.
Empirical Inference - Festschrift in Honor of Vladimir N. Vapnik
Springer, 2013 (book)
2012
ei
Hooge, J.
Automatische Seitenkettenzuordnung zur NMR Proteinstrukturaufklärung mittels ganzzahliger linearer Programmierung
University of Tübingen, Germany, 2012 (diplomathesis)
ei
pn
Klenske, E. D.
Nonparametric System Identification and Control for Periodic Error Correction in Telescopes
University of Stuttgart, 2012 (diplomathesis)
ps
Fossati, A., Gall, J., Grabner, H., Ren, X., Konolige, K.
Consumer Depth Cameras for Computer Vision - Research Topics and Applications
Advances in Computer Vision and Pattern Recognition, Springer, 2012 (book)
al
Der, R., Martius, G.
The Playful Machine - Theoretical Foundation and Practical Realization of Self-Organizing Robots
Springer, Berlin Heidelberg, 2012 (book)
2011
ei
Sra, S., Nowozin, S., Wright, S.
Optimization for Machine Learning
pages: 494, Neural information processing series, MIT Press, Cambridge, MA, USA, December 2011 (book)
ei
Barber, D., Cemgil, A., Chiappa, S.
Bayesian Time Series Models
pages: 432, Cambridge University Press, Cambridge, UK, August 2011 (book)
ei
Lu, H., Schölkopf, B., Zhao, H.
Handbook of Statistical Bioinformatics
pages: 627, Springer Handbooks of Computational Statistics, Springer, Berlin, Germany, 2011 (book)
2010
ei
Zscheischler, J.
Inferring High-Dimensional Causal Relations using Free Probability Theory
Humboldt Universität Berlin, Germany, August 2010 (diplomathesis)
ei
Shelton, J.
Semi-supervised Subspace Learning and Application to Human Functional Magnetic Brain Resonance Imaging Data
Biologische Kybernetik, Eberhard Karls Universität, Tübingen, Germany, July 2010 (diplomathesis)
ei
Mantlik, F.
Quantitative Evaluation of MR-based Attenuation Correction for Positron Emission Tomography (PET)
Biologische Kybernetik, Universität Mannheim, Germany, March 2010 (diplomathesis)
ei
Sigaud, O., Peters, J.
From Motor Learning to Interaction Learning in Robots
pages: 538, Studies in Computational Intelligence ; 264, (Editors: O Sigaud, J Peters), Springer, Berlin, Germany, January 2010 (book)
ei
Rakitsch, B.
Finding Gene-Gene Interactions using Support Vector Machines
Eberhard Karls Universität Tübingen, Germany, 2010 (diplomathesis)
ei
Köhler, R.
Detecting the mincut in sparse random graphs
Eberhard Karls Universität Tübingen, Germany, 2010 (diplomathesis)
mms
Hirscher, M.
Handbook of Hydrogen Storage
pages: 353 p., Wiley-VCH, Weinheim, 2010 (book)
2009
ei
Mülling, K.
Motor Control and Learning in Table Tennis
Eberhard Karls Universität Tübingen, Gerrmany, 2009 (diplomathesis)
ei
Drewe, P.
Hierarchical Clustering and Density Estimation Based on k-nearest-neighbor graphs
Eberhard Karls Universität Tübingen, Germany, 2009 (diplomathesis)