
2024
ei
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ei
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
ei
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ev
Achterhold, J., Guttikonda, S., Kreber, J. U., Li, H., Stueckler, J.
Learning a Terrain- and Robot-Aware Dynamics Model for Autonomous Mobile Robot Navigation
CoRR abs/2409.11452, 2024, Preprint submitted to Robotics and Autonomous Systems Journal. https://arxiv.org/abs/2409.11452 (techreport) Submitted
lds
Eberhard, O., Vernade, C., Muehlebach, M.
A Pontryagin Perspective on Reinforcement Learning
Max Planck Institute for Intelligent Systems, 2024 (techreport)
lds
Er, D., Trimpe, S., Muehlebach, M.
Distributed Event-Based Learning via ADMM
Max Planck Institute for Intelligent Systems, 2024 (techreport)
ev
Baumeister, F., Mack, L., Stueckler, J.
Incremental Few-Shot Adaptation for Non-Prehensile Object Manipulation using Parallelizable Physics Simulators
CoRR abs/2409.13228, CoRR, 2024, Submitted to IEEE International Conference on Robotics and Automation (ICRA) 2025 (techreport) Submitted
2023
ei
Jin, Z., Mihalcea, R.
Natural Language Processing for Policymaking
In Handbook of Computational Social Science for Policy, pages: 141-162, 7, (Editors: Bertoni, E. and Fontana, M. and Gabrielli, L. and Signorelli, S. and Vespe, M.), Springer International Publishing, 2023 (inbook)
ei
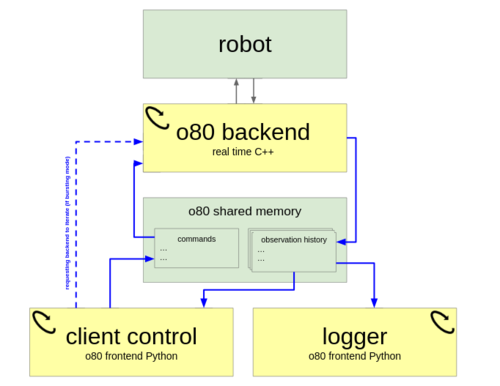
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
pf
Qiu, T., Jeong, M., Goyal, R., Kadiri, V., Sachs, J., Fischer, P.
Magnetic Micro-/Nanopropellers for Biomedicine
In Field-Driven Micro and Nanorobots for Biology and Medicine, pages: 389-410, 16, (Editors: Sun, Y. and Wang, X. and Yu, J.), Springer, Cham, 2022 (inbook)
re
Lieder, F., Prentice, M.
Life Improvement Science
In Encyclopedia of Quality of Life and Well-Being Research, Springer, November 2022 (inbook)
dlg
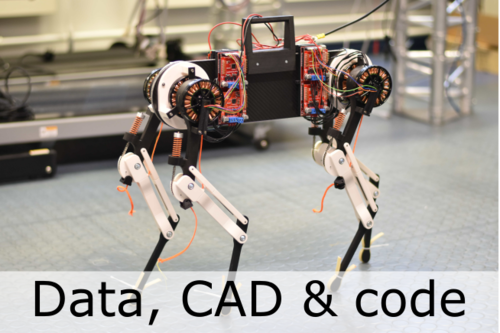
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
ei
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
dlg
pi
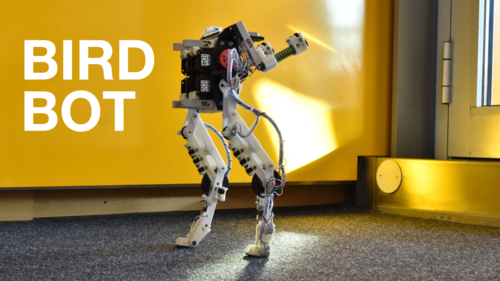
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
ei
Peters, J., Bauer, S., Pfister, N.
Causal Models for Dynamical Systems
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 671-690, 1, Association for Computing Machinery, 2022 (inbook)
ei
plg
Karimi, A. H., von Kügelgen, J., Schölkopf, B., Valera, I.
Towards Causal Algorithmic Recourse
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 139-166, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Salewski, L., Koepke, A. S., Lensch, H. P. A., Akata, Z.
CLEVR-X: A Visual Reasoning Dataset for Natural Language Explanations
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 69-88, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Schölkopf, B.
Causality for Machine Learning
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 765-804, 1, Association for Computing Machinery, New York, NY, USA, 2022 (inbook)
2021
rm
Purnendu, , Novack, S., Acome, E., Alistar, M., Keplinger, C., Gross, M. D., Bruns, C., Leithinger, D.
Electriflow: Augmenting Books With Tangible Animation Using Soft Electrohydraulic Actuators
In ACM SIGGRAPH 2021 Labs, pages: 1-2, Association for Computing Machinery, SIGGRAPH 2021, August 2021 (inbook)
ei
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
re
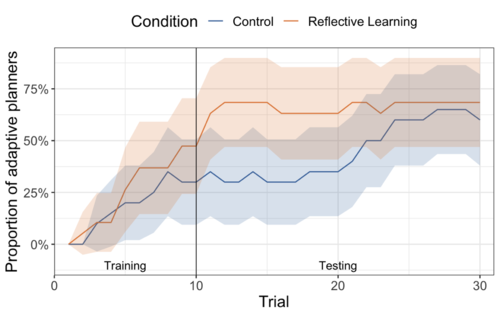
Frederic Becker, , Lieder, F.
Promoting metacognitive learning through systematic reflection
The first edition of Life Improvement Science Conference, June 2021 (poster)
re
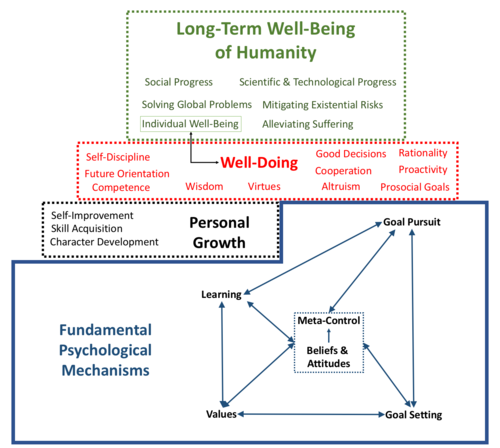
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
re
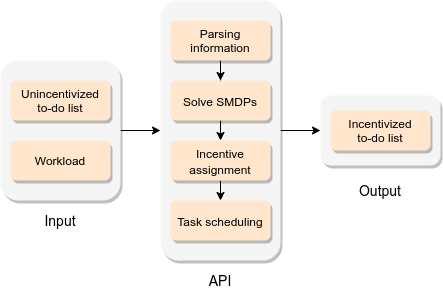
Consul, S., Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification for Long Term Planning
arXiv preprint arXiv:2109.06505, 2021 (techreport)
minibot
Chu, X., Wang, W., Müller, J., Schöning, H. V., Liu, Y., Weigand, B.
Turbulence Modulation and Energy Transfer in Turbulent Channel Flow Coupled with One-Side Porous Media
In High Performance Computing in Science and Engineering’20, pages: 373-386, Springer, 2021 (incollection)
2020
dlg
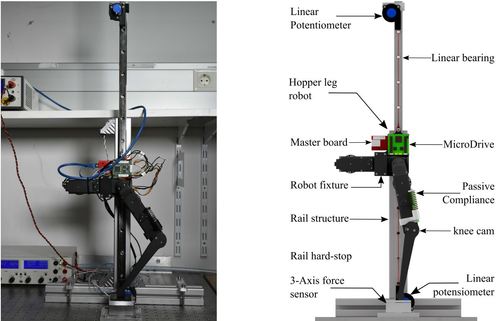
Milad Shafiee Ashtiani, A. A. S., Badri-Sproewitz, A.
Towards Hybrid Active and Passive Compliant Mechanisms in Legged Robots
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2020 (poster) Accepted
re
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
dlg
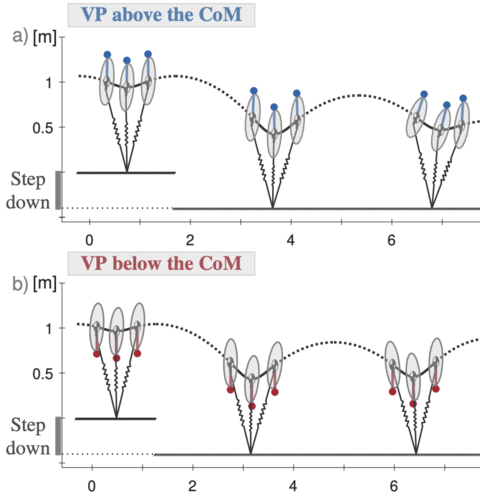
Drama, Ö., Badri-Spröwitz, A.
VP above or below? A new perspective on the story of the virtual point
Dynamic Walking, May 2020 (poster)
dlg
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Viscous Damping in Legged Locomotion
Dynamic Walking, May 2020 (poster)
dlg
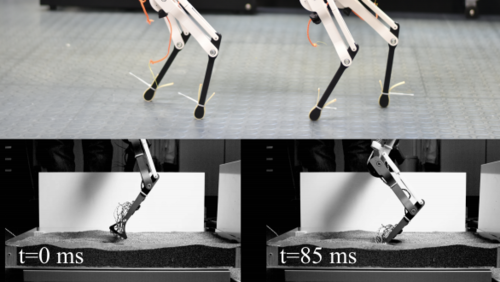
Ruppert, F., Badri-Spröwitz, A.
How Quadrupeds Benefit from Lower Leg Passive Elasticity
Dynamic Walking, May 2020 (poster)
dlg
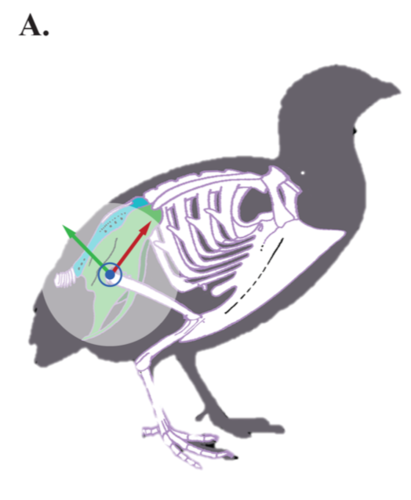
Kamska, V., Daley, M., Badri-Spröwitz, A.
Potential for elastic soft tissue deformation and mechanosensory function within the lumbosacral spinal canal of birds
Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2020), January 2020 (poster)
ev
25th International Symposium on Vision, Modeling and Visualization, VMV 2020
(Editors: Jens Krüger and Matthias Nießner and Jörg Stückler), Eurographics Association, 2020 (proceedings)
am
ics
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision
ev
Usenko, V., Stumberg, L. V., Stückler, J., Cremers, D.
TUM Flyers: Vision-Based MAV Navigation for Systematic Inspection of Structures
In Bringing Innovative Robotic Technologies from Research Labs to Industrial End-users: The Experience of the European Robotics Challenges, 136, pages: 189-209, Springer Tracts in Advanced Robotics, Springer International Publishing, 2020 (inbook)
ics
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)
icm
Popescu, M. N., Uspal, W. E.
Adopting the Boundary Homogenization Approximation from Chemical Kinetics to Motile Chemically Active Particles
In Chemical Kinetics, pages: 517-540, (Editors: Lindenberg, Katja and Metzler, Ralf and Oshanin, Gleb), World Scientific, New Jersey, NJ, 2020 (incollection)
ncs
Thies, J., Zollhöfer, M., Theobalt, C., Stamminger, M., Nießner, M.
Image-guided Neural Object Rendering
In International Conference on Learning Representations, 2020 (incollection)
pf
Palagi, S.
Soft Microrobots Based on Photoresponsive Materials
In Mechanically Responsive Materials for Soft Robotics, pages: 327-362, (Editors: Koshima, Hideko), Wiley-VCH, Weinheim, 2020 (incollection)
2019
ps
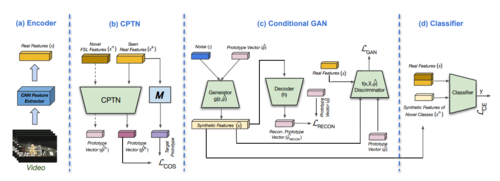
Dwivedi, S. K., Gupta, V., Mitra, R., Ahmed, S., Jain, A.
ProtoGAN: Towards Few Shot Learning for Action Recognition
Proc. International Conference on Computer Vision (ICCV) Workshops, October 2019 (manual)
ei
Meding, K., Schölkopf, B., Wichmann, F. A.
Perception of temporal dependencies in autoregressive motion
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
ei
Bruijns, S. A., Meding, K., Schölkopf, B., Wichmann, F. A.
Phenomenal Causality and Sensory Realism
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
ei
Shao, K., Logothetis, N., Besserve, M.
Neural mass modeling of the Ponto-Geniculo-Occipital wave and its neuromodulation
28th Annual Computational Neuroscience Meeting (CNS*2019), July 2019 (poster)
ics
Mager, F., Baumann, D., Jacob, R., Thiele, L., Trimpe, S., Zimmerling, M.
Demo Abstract: Fast Feedback Control and Coordination with Mode Changes for Wireless Cyber-Physical Systems
Proceedings of the 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 340-341, 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), April 2019 (poster)
mms
Schütz, G.
Nanomagnetismus im Röntgenlicht
In Vielfältige Physik, pages: 173-182, Springer Spektrum, Berlin, Heidelberg, 2019 (incollection)
lds
Muehlebach, M.
The Silver Ratio and its Relation to Controllability
2019 (techreport)

dlg
Badri-Spröwitz, A.
Das Tier als Modell für Roboter, und Roboter als Modell für Tiere
In pages: 167-175, Springer, 2019 (incollection)
2018
pf
Palagi, S., Walker, D. Q. T., Fischer, P.
Nanoscale robotic agents in biological fluids and tissues
In The Encyclopedia of Medical Robotics, 2, pages: 19-42, 2, (Editors: Desai, J. P. and Ferreira, A.), World Scientific, October 2018 (inbook)
hi
Kuchenbecker, K. J.
Haptics and Haptic Interfaces
In Encyclopedia of Robotics, (Editors: Marcelo H. Ang and Oussama Khatib and Bruno Siciliano), Springer, May 2018 (incollection)
ics
Mager, F., Baumann, D., Trimpe, S., Zimmerling, M.
Poster Abstract: Toward Fast Closed-loop Control over Multi-hop Low-power Wireless Networks
Proceedings of the 17th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 158-159, Porto, Portugal, April 2018 (poster)