
2024
ei
Ortu, F.
Interpreting How Large Language Models Handle Facts and Counterfactuals through Mechanistic Interpretability
University of Trieste, Italy, March 2024 (mastersthesis)
2023
ei
Sakenyte, U.
Denoising Representation Learning for Causal Discovery
Université de Genèva, Switzerland, December 2023, external supervision (mastersthesis)
ei
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
ei
Kofler, A.
Efficient Sampling from Differentiable Matrix Elements
Technical University of Munich, Germany, September 2023 (mastersthesis)
ei
Spieler, A. M.
Intrinsic complexity and mechanisms of expressivity of cortical neurons
University of Tübingen, Germany, March 2023 (mastersthesis)
lds
ei
Kladny, K.
CausalEffect Estimation by Combining Observational and Interventional Data
ETH Zurich, Switzerland, February 2023 (mastersthesis)
ei
Qui, Z.
Towards Generative Machine Teaching
Technical University of Munich, Germany, February 2023 (mastersthesis)
ei
Schneider, F.
ArchiSound: Audio Generation with Diffusion
ETH Zurich, Switzerland, January 2023, external supervision (mastersthesis)
ei
Dittrich, A.
Generation and Quantification of Spin in Robot Table Tennis
University of Stuttgart, Germany, January 2023 (mastersthesis)
ei
Jin, Z., Mihalcea, R.
Natural Language Processing for Policymaking
In Handbook of Computational Social Science for Policy, pages: 141-162, 7, (Editors: Bertoni, E. and Fontana, M. and Gabrielli, L. and Signorelli, S. and Vespe, M.), Springer International Publishing, 2023 (inbook)
2022
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
pf
Qiu, T., Jeong, M., Goyal, R., Kadiri, V., Sachs, J., Fischer, P.
Magnetic Micro-/Nanopropellers for Biomedicine
In Field-Driven Micro and Nanorobots for Biology and Medicine, pages: 389-410, 16, (Editors: Sun, Y. and Wang, X. and Yu, J.), Springer, Cham, 2022 (inbook)
re
Lieder, F., Prentice, M.
Life Improvement Science
In Encyclopedia of Quality of Life and Well-Being Research, Springer, November 2022 (inbook)
ei
Liang, W.
Investigating Independent Mechanisms in Neural Networks
Université Paris-Saclay, France, October 2022 (mastersthesis)
ei
Keidar, D.
Modeling subgroup differences in fMRI data: disentangling subgroup-specific responses from shared ones
ETH Zurich, Switzerland, October 2022 (mastersthesis)
ei
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
ei
Feil, M.
Multi-Target Multi-Object Manipulation using Relational Deep Reinforcement Learning
Technnical University Munich, Germany, September 2022 (mastersthesis)
ei
Sliwa, J.
Independent Mechanism Analysis for High Dimensions
University of Tübingen, Germany, September 2022, (Graduate Training Centre of Neuroscience) (mastersthesis)
ei
Dominguez-Olmedo, R.
On the Adversarial Robustness of Causal Algorithmic Recourse
University of Tübingen, Germany, August 2022 (mastersthesis)
ei
Ghosh, S.
Independent Mechanism Analysis in High-Dimensional Observation Spaces
ETH Zurich, Switzerland, June 2022 (mastersthesis)
ei
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
ei
Peters, J., Bauer, S., Pfister, N.
Causal Models for Dynamical Systems
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 671-690, 1, Association for Computing Machinery, 2022 (inbook)
ei
plg
Karimi, A. H., von Kügelgen, J., Schölkopf, B., Valera, I.
Towards Causal Algorithmic Recourse
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 139-166, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Salewski, L., Koepke, A. S., Lensch, H. P. A., Akata, Z.
CLEVR-X: A Visual Reasoning Dataset for Natural Language Explanations
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 69-88, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Schölkopf, B.
Causality for Machine Learning
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 765-804, 1, Association for Computing Machinery, New York, NY, USA, 2022 (inbook)
mms
Miller, M.
Voltage dependent investigations on the spin polarization of layered heterostructues
Universität Stuttgart, Stuttgart, 2022 (mastersthesis)
2021
ei
Scherrer, N.
Learning Neural Causal Models with Active Interventions
ETH Zurich, Switzerland, November 2021 (mastersthesis)
ei
Bing, S.
HealthGen: Conditional Generation of Realistic Medical Time Series with Informative Missingness
ETH Zurich, Switzerland, October 2021 (mastersthesis)
ei
Lanzillotta, G.
Study of the Interventional Consistency of Autoencoders
ETH Zurich, Switzerland, October 2021 (mastersthesis)
ev
Strecke, M., Stückler, J.
Physically Plausible Tracking & Reconstruction of Dynamic Objects
KIT Science Week Scientific Conference & DGR-Days 2021, October 2021 (talk)
ei
Mambelli, D.
Training with Few to Manipulate Many. On OOD generalization in relational reinforcement learning
ETH Zurich, Switzerland, October 2021 (mastersthesis)
rm
Purnendu, , Novack, S., Acome, E., Alistar, M., Keplinger, C., Gross, M. D., Bruns, C., Leithinger, D.
Electriflow: Augmenting Books With Tangible Animation Using Soft Electrohydraulic Actuators
In ACM SIGGRAPH 2021 Labs, pages: 1-2, Association for Computing Machinery, SIGGRAPH 2021, August 2021 (inbook)
ei
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
re
Heindrich, L., Consul, S., Stojcheski, J., Lieder, F.
Improving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Tübingen, Germany, The first edition of Life Improvement Science Conference, June 2021 (talk) Accepted
hi
Krauthausen, F.
Robotic Surgery Training in AR: Multimodal Record and Replay
pages: 1-147, University of Stuttgart, Stuttgart, May 2021, Study Program in Software Engineering (mastersthesis)
mms
Alten, F.
Direct detection of spin Hall effect induced torques in platinum/ferromagnetic bilayer systems
Universität Stuttgart, Stuttgart, January 2021 (mastersthesis)
pio
Zottino, N.
Community detection in heterogeneously attributed networks
Politecnico di Torino, 2021 (mastersthesis)
2020
mms
Sauter, R.
Hydromagnonics: Manipulation of magnonic systems with hydrogen
Universität Stuttgart, Stuttgart, December 2020 (mastersthesis)
ei
Ahmed, O.
A Robotic Manipulation Benchmark for Causal Structure and Transfer Learning
ETH Zurich, Switzerland, October 2020 (mastersthesis)
ei
DuMont Schütte, A.
A Comprehensive Benchmark Evaluation of Synthetic Data Generation for Biomedical Imaging
ETH Zurich, Switzerland, October 2020 (mastersthesis)
ei
Cacioppo, A.
Deep learning for the parameter estimation of tight-binding Hamiltonians
University of Roma, La Sapienza, Italy, May 2020 (mastersthesis)
dlg
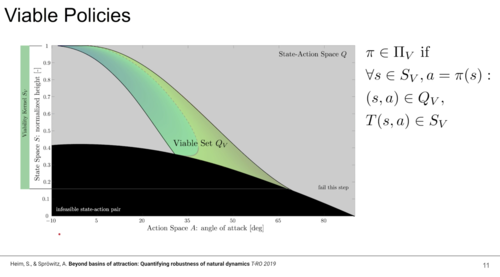
Heim, S., Badri-Spröwitz, A.
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
May 2020 (talk)
ei
Zecevic, M.
Learning Algorithms, Invariances, and the Real World
Technical University of Darmstadt, Germany, April 2020 (mastersthesis)
mms
Bondorf, L.
Interaction of hydrogen isotopes with flexible metal-organic frameworks
Universität Stuttgart, Stuttgart, February 2020 (mastersthesis)
icm
Dertli, Denis
Nichtgleichgewichtsdynamik einer abgekühlten kritischen Flüssigkeit mit Oberflächenfeldern unterschiedlichen Vorzeichens
Universität Stuttgart, Stuttgart, January 2020 (thesis)
am
ics
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision
pio
Lonardi, A.
Developing new methods for routing and optimal transport on networks
Università degli studi di Padova, 2020 (mastersthesis)
ev
Usenko, V., Stumberg, L. V., Stückler, J., Cremers, D.
TUM Flyers: Vision-Based MAV Navigation for Systematic Inspection of Structures
In Bringing Innovative Robotic Technologies from Research Labs to Industrial End-users: The Experience of the European Robotics Challenges, 136, pages: 189-209, Springer Tracts in Advanced Robotics, Springer International Publishing, 2020 (inbook)
pio
Lorenzo Ferretti
Edge-Disjoint Path Problem on Stochastic Block Models through Message Passing
Sapienza Università di Roma, 2020 (mastersthesis)
icm
Popescu, M. N., Uspal, W. E.
Adopting the Boundary Homogenization Approximation from Chemical Kinetics to Motile Chemically Active Particles
In Chemical Kinetics, pages: 517-540, (Editors: Lindenberg, Katja and Metzler, Ralf and Oshanin, Gleb), World Scientific, New Jersey, NJ, 2020 (incollection)