2025
ps
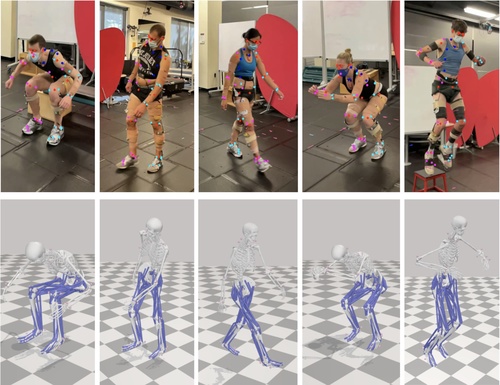
Gozlan, Y., Falisse, A., Uhlrich, S., Gatti, A., Black, M., Chaudhari, A.
OpenCapBench: A Benchmark to Bridge Pose Estimation and Biomechanics
In IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) , February 2025 (inproceedings)

2024
sf
Salaudeen, O., Hardt, M.
ImageNot: A Contrast with ImageNet Preserves Model Rankings
arXiv preprint arXiv:2404.02112, 2024 (conference) Submitted
sf
Nastl, V. Y., Hardt, M.
Predictors from Causal Features Do Not Generalize Better to New Domains
arXiv preprint arXiv:2402.09891, 2024 (conference) Submitted
sf
Mendler-Dünner, C., Carovano, G., Hardt, M.
An Engine Not a Camera: Measuring Performative Power of Online Search
arXiv preprint arXiv:2405.19073, 2024 (conference) Submitted

ps
Athanasiou, N., Cseke, A., Diomataris, M., Wen, M. J. B., Varol, G.
MotionFix: Text-Driven 3D Human Motion Editing
In SIGGRAPH Asia 2024 Conference Proceedings, ACM, December 2024 (inproceedings) To be published
sf
Dominguez-Olmedo, R., Hardt, M., Mendler-Dünner, C.
Questioning the Survey Responses of Large Language Models
arXiv preprint arXiv:2306.07951, 2024 (conference) Submitted
sf
Dominguez-Olmedo, R., Dorner, F. E., Hardt, M.
Training on the Test Task Confounds Evaluation and Emergence
arXiv preprint arXiv:2407.07890, 2024 (conference) Submitted
hi
Mohan, M., Kuchenbecker, K. J.
Demonstration: OCRA - A Kinematic Retargeting Algorithm for Expressive Whole-Arm Teleoperation
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
al
hi
ei
Andrussow, I., Sun, H., Martius, G., Kuchenbecker, K. J.
Demonstration: Minsight - A Soft Vision-Based Tactile Sensor for Robotic Fingertips
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
hi
Bartels, J. U., Sanchez-Tamayo, N., Sedlmair, M., Kuchenbecker, K. J.
Active Haptic Feedback for a Virtual Wrist-Anchored User Interface
Hands-on demonstration presented at the ACM Symposium on User Interface Software and Technology (UIST), Pittsburgh, USA, October 2024 (misc) Accepted

ncs
ps
Ostrek, M., Thies, J.
Stable Video Portraits
In European Conference on Computer Vision (ECCV 2024), LNCS, Springer Cham, European Conference on Computer Vision (ECCV 2024), October 2024 (inproceedings) Accepted

ps
Dakri, A., Arora, V., Challier, L., Keller, M., Black, M. J., Pujades, S.
On predicting 3D bone locations inside the human body
In 26th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI), October 2024 (inproceedings)

ncs
ps
Ostrek, M., O’Sullivan, C., Black, M., Thies, J.
Synthesizing Environment-Specific People in Photographs
In European Conference on Computer Vision (ECCV 2024), LNCS, Springer Cham, European Conference on Computer Vision (ECCV 2024), October 2024 (inproceedings) Accepted

ps
Tripathi, S., Taheri, O., Lassner, C., Black, M. J., Holden, D., Stoll, C.
HUMOS: Human Motion Model Conditioned on Body Shape
In European Conference on Computer Vision (ECCV 2024), LNCS, Springer Cham, October 2024 (inproceedings)
ps
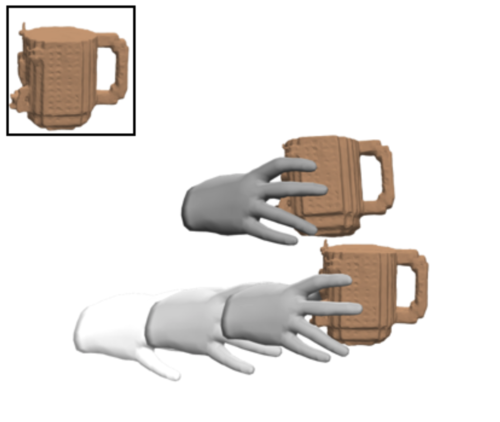
Zhang, H., Christen, S., Fan, Z., Hilliges, O., Song, J.
GraspXL: Generating Grasping Motions for Diverse Objects at Scale
In European Conference on Computer Vision (ECCV 2024), LNCS, Springer Cham, September 2024 (inproceedings) Accepted
hi
rm
Sanchez-Tamayo, N., Yoder, Z., Rothemund, P., Ballardini, G., Keplinger, C., Kuchenbecker, K. J.
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Advanced Science, (2402461):1-14, September 2024 (article)
rm
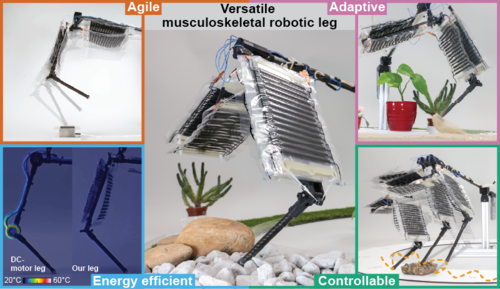
Buchner, T. J. K., Fukushima, T., Kazemipour, A., Gravert, S., Prairie, M., Romanescu, P., Arm, P., Zhang, Y., Wang, X., Zhang, S. L., Walter, J., Keplinger, C., Katzschmann, R. K.
Electrohydraulic Musculoskeletal Robotic Leg for Agile, Adaptive, yet Energy-Efficient Locomotion
Nature Communications, 15(1), September 2024 (article)
ei
Schumacher, P., Krause, L., Schneider, J., Büchler, D., Martius, G., Haeufle, D.
Learning to Control Emulated Muscles in Real Robots: Towards Exploiting Bio-Inspired Actuator Morphology
In 10th International Conference on Biomedical Robotics and Biomechatronics (BioRob), September 2024 (inproceedings) Accepted
ps
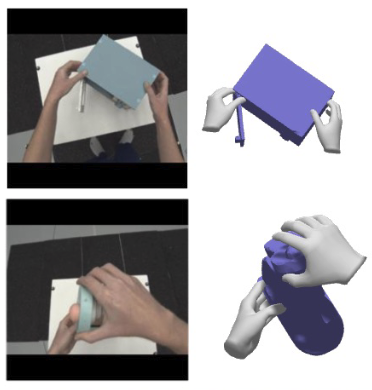
Fan, Z., Ohkawa, T., Yang, L., Lin, N., Zhou, Z., Zhou, S., Liang, J., Gao, Z., Zhang, X., Zhang, X., Li, F., Zheng, L., Lu, F., Zeid, K. A., Leibe, B., On, J., Baek, S., Prakash, A., Gupta, S., He, K., Sato, Y., Hilliges, O., Chang, H. J., Yao, A.
Benchmarks and Challenges in Pose Estimation for Egocentric Hand Interactions with Objects
In European Conference on Computer Vision (ECCV 2024), LNCS, Springer Cham, September 2024 (inproceedings) Accepted

ps
Zuffi, S., Black, M. J.
AWOL: Analysis WithOut synthesis using Language
In European Conference on Computer Vision (ECCV 2024), LNCS, Springer Cham, September 2024 (inproceedings)
hi
Rokhmanova, N., Martus, J., Faulkner, R., Fiene, J., Kuchenbecker, K. J.
Modeling Shank Tissue Properties and Quantifying Body Composition with a Wearable Actuator-Accelerometer Set
Extended abstract (1 page) presented at the American Society of Biomechanics Annual Meeting (ASB), Madison, USA, August 2024 (misc)
ei
Schneider, F., Kamal, O., Jin, Z., Schölkopf, B.
Moûsai: Efficient Text-to-Music Diffusion Models
Proceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (ACL), Volume 1: Long Papers, pages: 8050-8068, (Editors: Lun-Wei Ku and Andre Martins and Vivek Srikumar), Association for Computational Linguistics, August 2024 (conference)
ei
Wu*, W., Chen*, W., Zhang, C., Woodland, P. C.
Modelling Variability in Human Annotator Simulation
Findings of the Association for Computational Linguistics (ACL), pages: 1139-1157, (Editors: Ku, Lun-Wei and Martins, Andre and Srikumar, Vivek), Association for Computational Linguistics, August 2024, *equal contribution (conference)
ei
Ortu*, F., Jin*, Z., Doimo, D., Sachan, M., Cazzaniga, A., Schölkopf, B.
Competition of Mechanisms: Tracing How Language Models Handle Facts and Counterfactuals
Proceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (ACL) , Volume 1, Long Papers, pages: 8420-8436, (Editors: Lun-Wei Ku and Andre Martins and Vivek Srikumar), Association for Computational Linguistics, August 2024, *equal contribution (conference)
ei
Kumar, I., Jin, Z., Mokhtarian, E., Guo, S., Chen, Y., Kiyavash, N., Sachan, M., Schölkopf, B.
CausalCite: A Causal Formulation of Paper Citations
Findings of the Association for Computational Linguistics (ACL), pages: 8395-8410, (Editors: Ku, Lun-Wei and Martins, Andre and Srikumar, Vivek), Association for Computational Linguistics, August 2024 (conference)

ps
Kulits, P., Feng, H., Liu, W., Abrevaya, V., Black, M. J.
Re-Thinking Inverse Graphics with Large Language Models
Transactions on Machine Learning Research, August 2024 (article)
ei
Chen*, W., Horwood*, J., Heo, J., Hernández-Lobato, J. M.
Leveraging Task Structures for Improved Identifiability in Neural Network Representations
Transactions on Machine Learning Research, August 2024, *equal contribution (article)
hi
Schulz, A., Serhat, G., Kuchenbecker, K. J.
Adapting a High-Fidelity Simulation of Human Skin for Comparative Touch Sensing
Extended abstract (1 page) presented at the American Society of Biomechanics Annual Meeting (ASB), Madison, USA, August 2024 (misc)
ei
Dmitriev, D., Szabó, K., Sanyal, A.
On the Growth of Mistakes in Differentially Private Online Learning: A Lower Bound Perspective
Proceedings of the 37th Annual Conference on Learning Theory (COLT), 247, pages: 1379-1398, Proceedings of Machine Learning Research, (Editors: Agrawal, Shipra and Roth, Aaron), PMLR, July 2024, (talk) (conference)
ei
Buchholz, S., Schölkopf, B.
Robustness of Nonlinear Representation Learning
Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 4785-4821, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (conference)
ei
Beck, J., Bosch, N., Deistler, M., Kadhim, K. L., Macke, J. H., Hennig, P., Berens, P.
Diffusion Tempering Improves Parameter Estimation with Probabilistic Integrators for ODEs
Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 3305-3326, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (conference)
ei
Schröder, C., Macke, J. H.
Simultaneous identification of models and parameters of scientific simulators
Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 43895-43927, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (conference)
al
Urpi, N. A., Bagatella, M., Vlastelica, M., Martius, G.
Causal Action Influence Aware Counterfactual Data Augmentation
In Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 1709-1729, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (inproceedings)
ei
robustml
Reizinger, P., Ujváry, S., Mészáros, A., Kerekes, A., Brendel, W., Huszár, F.
Position: Understanding LLMs Requires More Than Statistical Generalization
Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 42365-42390, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (conference)
ei
Chen*, W., Zhang*, M., Paige, B., Hernández-Lobato, J. M., Barber, D.
Diffusive Gibbs Sampling
Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 7731-7747, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024, *equal contribution (conference)
ei
Jain, S., Lubana, E. S., Oksuz, K., Joy, T., Torr, P. H. S., Sanyal, A., Dokania, P. K.
What Makes Safety Fine-tuning Methods Safe? A Mechanistic Study
ICML 2024 Workshop on Mechanistic Interpretability (Spotlight), July 2024 (conference)
hi
Khojasteh, B., Solowjow, F., Trimpe, S., Kuchenbecker, K. J.
Multimodal Multi-User Surface Recognition with the Kernel Two-Sample Test
IEEE Transactions on Automation Science and Engineering, 21(3):4432-4447, July 2024 (article)
sf
Shirali, A., Abebe*, R., Hardt*, M.
Allocation Requires Prediction Only if Inequality Is Low
In Proceedings of the 41st International Conference on Machine Learning (ICML), PMLR, July 2024, *equal contribution (inproceedings)
sf
Zhang, G., Hardt, M.
Inherent Trade-Offs between Diversity and Stability in Multi-Task Benchmarks
In Proceedings of the 41st International Conference on Machine Learning (ICML), PMLR, July 2024 (inproceedings)
sf
Dorner, F. E., Hardt, M.
Don’t Label Twice: Quantity Beats Quality when Comparing Binary Classifiers on a Budget
In Proceedings of the 41st International Conference on Machine Learning (ICML), PMLR, July 2024 (inproceedings)
al
Geist, A. R., Frey, J., Zhobro, M., Levina, A., Martius, G.
Learning with 3D rotations, a hitchhiker’s guide to SO(3)
In Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 15331-15350, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (inproceedings)
al
Paulus, A., Martius, G., Musil, V.
LPGD: A General Framework for Backpropagation through Embedded Optimization Layers
In Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 39989-40014, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (inproceedings)
ei
Bouchiat, K., Immer, A., Yèche, H., Rätsch, G., Fortuin, V.
Improving Neural Additive Models with Bayesian Principles
Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 4416-4443, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (conference)
ei
Abdolahpourrostam, A., Sanyal, A., Moosavi-Dezfooli, S.
Unveiling CLIP Dynamics: Linear Mode Connectivity and Generalization
ICML 2024 Workshop on Foundation Models in the Wild, July 2024 (conference)
ei
Xu, D., Yao, D., Lachapelle, S., Taslakian, P., von Kügelgen, J., Locatello, F., Magliacane, S.
A Sparsity Principle for Partially Observable Causal Representation Learning
Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 55389-55433, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (conference)

ps
Grigorev, A., Becherini, G., Black, M., Hilliges, O., Thomaszewski, B.
ContourCraft: Learning to Resolve Intersections in Neural Multi-Garment Simulations
In ACM SIGGRAPH 2024 Conference Papers, pages: 1-10, SIGGRAPH ’24, Association for Computing Machinery, New York, NY, USA, July 2024 (inproceedings)
sf
Stoica, A., Nastl, V. Y., Hardt, M.
Causal Inference from Competing Treatments
In Proceedings of the 41st International Conference on Machine Learning (ICML), PMLR, July 2024 (inproceedings)
ei
Park, J.
A Measure-Theoretic Axiomatisation of Causality and Kernel Regression
University of Tübingen, Germany, July 2024 (phdthesis)
ei
Kremer, H., Schölkopf, B.
Geometry-Aware Instrumental Variable Regression
Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 25560-25582, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (conference)
ei
Kekić, A., Schölkopf, B., Besserve, M.
Targeted Reduction of Causal Models
40th Conference on Uncertainty in Artificial Intelligence (UAI), July 2024 (conference) To be published