
2024
ei
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
ev
Achterhold, J., Guttikonda, S., Kreber, J. U., Li, H., Stueckler, J.
Learning a Terrain- and Robot-Aware Dynamics Model for Autonomous Mobile Robot Navigation
CoRR abs/2409.11452, 2024, Preprint submitted to Robotics and Autonomous Systems Journal. https://arxiv.org/abs/2409.11452 (techreport) Submitted
lds
Eberhard, O., Vernade, C., Muehlebach, M.
A Pontryagin Perspective on Reinforcement Learning
Max Planck Institute for Intelligent Systems, 2024 (techreport)
lds
Er, D., Trimpe, S., Muehlebach, M.
Distributed Event-Based Learning via ADMM
Max Planck Institute for Intelligent Systems, 2024 (techreport)
ev
Baumeister, F., Mack, L., Stueckler, J.
Incremental Few-Shot Adaptation for Non-Prehensile Object Manipulation using Parallelizable Physics Simulators
CoRR abs/2409.13228, CoRR, 2024, Submitted to IEEE International Conference on Robotics and Automation (ICRA) 2025 (techreport) Submitted

2023
sf
Barocas, S., Hardt, M., Narayanan, A.
Fairness in Machine Learning: Limitations and Opportunities
MIT Press, December 2023 (book)
dlg
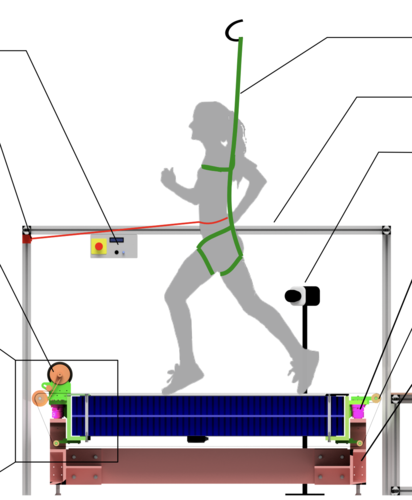
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
ei
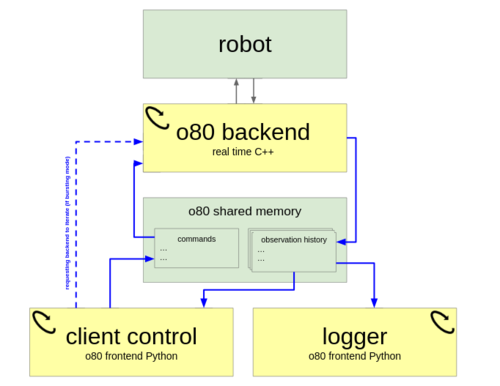
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
sf
Hardt, M., Recht, B.
Patterns, Predictions, and Actions: Foundations of Machine Learning
Princeton University Press, August 2022 (book)
dlg
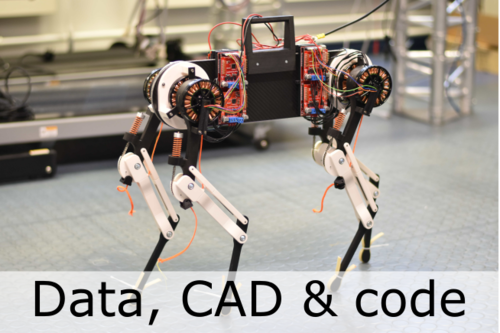
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
ei
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
dlg
pi
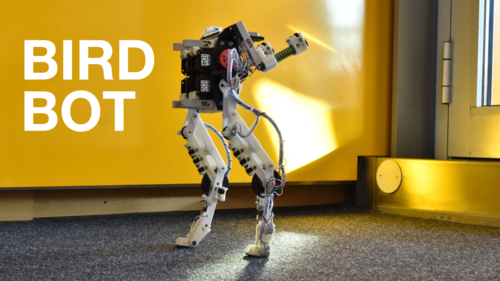
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
2021
ei
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
re
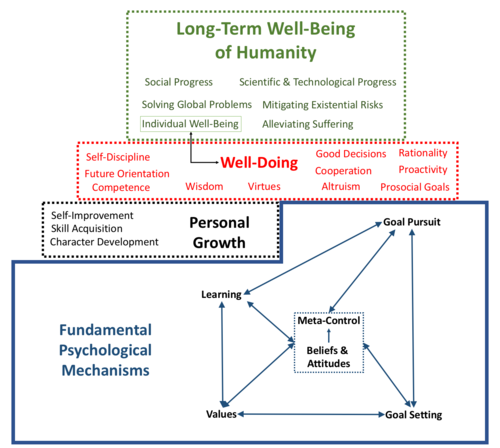
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
re
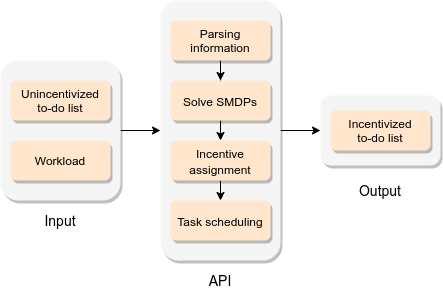
Consul, S., Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification for Long Term Planning
arXiv preprint arXiv:2109.06505, 2021 (techreport)
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
ei
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)

ei
hi
ps
pi
rm
Scientific Report 2016 - 2021
2021 (mpi_year_book)
2020
mms
Nacke, R.
Voltage dependent interfacial magnetism in multilayer systems
Universität Stuttgart, Stuttgart, December 2020 (thesis)
re
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
ev
25th International Symposium on Vision, Modeling and Visualization, VMV 2020
(Editors: Jens Krüger and Matthias Nießner and Jörg Stückler), Eurographics Association, 2020 (proceedings)
am
ics
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision
ics
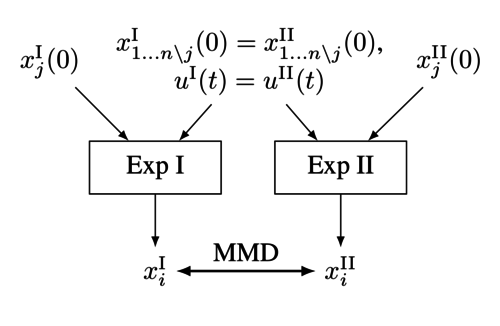
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)

avg
Janai, J., Güney, F., Behl, A., Geiger, A.
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
12(1-3), Foundations and Trends® in Computer Graphics and Vision, now Publishers Inc., Hanover, MA, 2020 (book)
2019
ps
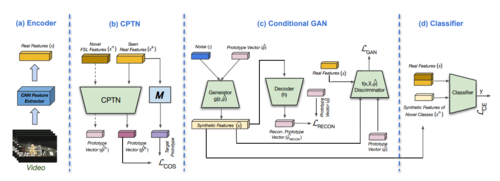
Dwivedi, S. K., Gupta, V., Mitra, R., Ahmed, S., Jain, A.
ProtoGAN: Towards Few Shot Learning for Action Recognition
Proc. International Conference on Computer Vision (ICCV) Workshops, October 2019 (manual)

ei
hi
ps
pi
Scientific Report 2016 - 2018
2019 (mpi_year_book)
lds
Muehlebach, M.
The Silver Ratio and its Relation to Controllability
2019 (techreport)
mms
Keskinbora, K.
Prototyping Micro- and Nano-Optics with Focused Ion Beam Lithography
SL48, pages: 46, SPIE.Spotlight, SPIE Press, Bellingham, WA, 2019 (book)
2018
ev
Ma, L., Stueckler, J., Wu, T., Cremers, D.
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform
arxiv, 2018, arXiv:1808.01834 (techreport)
lds
Muehlebach, M., D’Andrea, R.
On the Approximation of Constrained Linear Quadratic Regulator Problems and their Application to Model Predictive Control
2018 (techreport)
slt
Keriven, N., Garreau, D., Poli, I.
NEWMA: a new method for scalable model-free online change-point detection
2018 (techreport)
pf
Wu, Z., Troll, J., Jeong, H., Qiang, W., Stang, M., Ziemssen, F., Wang, Z., Dong, M., Schnichels, S., Qiu, T., Fischer, P.
Nanorobots propel through the eye
Max Planck Society, 2018 (mpi_year_book)
2017
ei
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
pi
Sitti, M.
Mobile Microrobotics
Mobile Microrobotics, The MIT Press, Cambridge, MA, 2017 (book)
2016
ei
Ihler, A. T., Janzing, D.
Proceedings of the 32nd Conference on Uncertainty in Artificial Intelligence (UAI)
pages: 869 pages, AUAI Press, June 2016 (proceedings)
am
ics
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
am
ics
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)

ps
Gall, J., Gehler, P., Leibe, B.
Proceedings of the 37th German Conference on Pattern Recognition
Springer, German Conference on Pattern Recognition, October 2015 (proceedings)
am
ics
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)
ei
Abbott, T., Abdalla, F. B., Allam, S., Amara, A., Annis, J., Armstrong, R., Bacon, D., Banerji, M., Bauer, A. H., Baxter, E., others,
Cosmology from Cosmic Shear with DES Science Verification Data
arXiv preprint arXiv:1507.05552, 2015 (techreport)
ei
Jarvis, M., Sheldon, E., Zuntz, J., Kacprzak, T., Bridle, S. L., Amara, A., Armstrong, R., Becker, M. R., Bernstein, G. M., Bonnett, C., others,
The DES Science Verification Weak Lensing Shear Catalogs
arXiv preprint arXiv:1507.05603, 2015 (techreport)

2014
ps
Nowozin, S., Gehler, P. V., Jancsary, J., Lampert, C. H.
Advanced Structured Prediction
Advanced Structured Prediction, pages: 432, Neural Information Processing Series, MIT Press, November 2014 (book)
ps
Freifeld, O., Hauberg, S., Black, M. J.
Model transport: towards scalable transfer learning on manifolds - supplemental material
(9), April 2014 (techreport)
ps
Ahmad, A., Amigoni, A., Awaad, I., Berghofer, J., Bischoff, R., Bonarini, A., Dwiputra, R., Fontana, G., Hegger, F., Hochgeschwender, N., Iocchi, L., Kraetzschmar, G., Lima, P., Matteucci, M., Nardi, D., Schiaffonati, V., Schneider, S.
RoCKIn@Work in a Nutshell
(FP7-ICT-601012 Revision 1.2), RoCKIn - Robot Competitions Kick Innovation in Cognitive Systems and Robotics, March 2014 (techreport)
ps
Ahmad, A., Amigoni, F., Awaad, I., Berghofer, J., Bischoff, R., Bonarini, A., Dwiputra, R., Fontana, G., Hegger, F., Hochgeschwender, N., Iocchi, L., Kraetzschmar, G., Lima, P., Matteucci, M., Nardi, D., Schneider, S.
RoCKIn@Home in a Nutshell
(FP7-ICT-601012 Revision 0.8), RoCKIn - Robot Competitions Kick Innovation in Cognitive Systems and Robotics, March 2014 (techreport)
ei
Kober, J., Peters, J.
Learning Motor Skills: From Algorithms to Robot Experiments
97, pages: 191, Springer Tracts in Advanced Robotics, Springer, 2014 (book)
ei
Schultz, T., Nedjati-Gilani, G., Venkataraman, A., O’Donnell, L., Panagiotaki, E.
Computational Diffusion MRI and Brain Connectivity
pages: 255, Mathematics and Visualization, Springer, 2014 (book)

ps
Tang, S., Andriluka, M., Milan, A., Schindler, K., Roth, S., Schiele, B.
Learning People Detectors for Tracking in Crowded Scenes.
2014, Scene Understanding Workshop (SUNw, CVPR workshop) (unpublished)