
2023
sf
Barocas, S., Hardt, M., Narayanan, A.
Fairness in Machine Learning: Limitations and Opportunities
MIT Press, December 2023 (book)
dlg
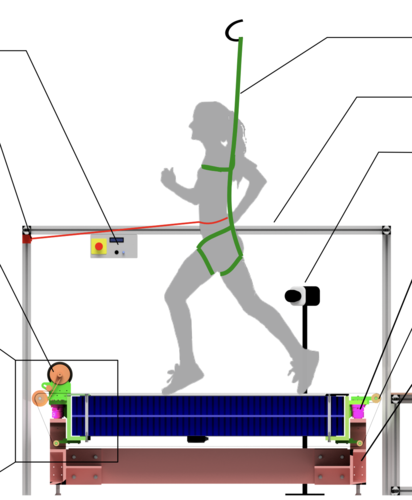
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted

2022
sf
Hardt, M., Recht, B.
Patterns, Predictions, and Actions: Foundations of Machine Learning
Princeton University Press, August 2022 (book)
2021
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
ei
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)

ei
hi
ps
pi
rm
Scientific Report 2016 - 2021
2021 (mpi_year_book)

2020
avg
Janai, J., Güney, F., Behl, A., Geiger, A.
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
12(1-3), Foundations and Trends® in Computer Graphics and Vision, now Publishers Inc., Hanover, MA, 2020 (book)

mms
Keskinbora, K.
Prototyping Micro- and Nano-Optics with Focused Ion Beam Lithography
SL48, pages: 46, SPIE.Spotlight, SPIE Press, Bellingham, WA, 2019 (book)
2018
pf
Wu, Z., Troll, J., Jeong, H., Qiang, W., Stang, M., Ziemssen, F., Wang, Z., Dong, M., Schnichels, S., Qiu, T., Fischer, P.
Nanorobots propel through the eye
Max Planck Society, 2018 (mpi_year_book)
2017
ei
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
pi
Sitti, M.
Mobile Microrobotics
Mobile Microrobotics, The MIT Press, Cambridge, MA, 2017 (book)

2014
ps
Nowozin, S., Gehler, P. V., Jancsary, J., Lampert, C. H.
Advanced Structured Prediction
Advanced Structured Prediction, pages: 432, Neural Information Processing Series, MIT Press, November 2014 (book)
ei
Kober, J., Peters, J.
Learning Motor Skills: From Algorithms to Robot Experiments
97, pages: 191, Springer Tracts in Advanced Robotics, Springer, 2014 (book)
2013
ei
Schölkopf, B., Luo, Z., Vovk, V.
Empirical Inference - Festschrift in Honor of Vladimir N. Vapnik
Springer, 2013 (book)
2012
ps
Fossati, A., Gall, J., Grabner, H., Ren, X., Konolige, K.
Consumer Depth Cameras for Computer Vision - Research Topics and Applications
Advances in Computer Vision and Pattern Recognition, Springer, 2012 (book)
al
Der, R., Martius, G.
The Playful Machine - Theoretical Foundation and Practical Realization of Self-Organizing Robots
Springer, Berlin Heidelberg, 2012 (book)
2011
ei
Sra, S., Nowozin, S., Wright, S.
Optimization for Machine Learning
pages: 494, Neural information processing series, MIT Press, Cambridge, MA, USA, December 2011 (book)
ei
Barber, D., Cemgil, A., Chiappa, S.
Bayesian Time Series Models
pages: 432, Cambridge University Press, Cambridge, UK, August 2011 (book)
ei
Lu, H., Schölkopf, B., Zhao, H.
Handbook of Statistical Bioinformatics
pages: 627, Springer Handbooks of Computational Statistics, Springer, Berlin, Germany, 2011 (book)
2010
ei
Sigaud, O., Peters, J.
From Motor Learning to Interaction Learning in Robots
pages: 538, Studies in Computational Intelligence ; 264, (Editors: O Sigaud, J Peters), Springer, Berlin, Germany, January 2010 (book)
mms
Hirscher, M.
Handbook of Hydrogen Storage
pages: 353 p., Wiley-VCH, Weinheim, 2010 (book)
2007
ei
Bakir, G., Hofmann, T., Schölkopf, B., Smola, A., Taskar, B., Vishwanathan, S.
Predicting Structured Data
pages: 360, Advances in neural information processing systems, MIT Press, Cambridge, MA, USA, September 2007 (book)
2006
ei
Chapelle, O., Schölkopf, B., Zien, A.
Semi-Supervised Learning
pages: 508, Adaptive computation and machine learning, MIT Press, Cambridge, MA, USA, September 2006 (book)
ei
Rasmussen, CE., Williams, CKI.
Gaussian Processes for Machine Learning
pages: 248, Adaptive Computation and Machine Learning, MIT Press, Cambridge, MA, USA, January 2006 (book)
2004
ei
Schölkopf, B., Tsuda, K., Vert, J.
Kernel Methods in Computational Biology
pages: 410, Computational Molecular Biology, MIT Press, Cambridge, MA, USA, August 2004 (book)
2003
mms
Kronmüller, H., Fähnle, M.
Magnetism and the Microstructure of Ferromagnetic Solids
pages: 432 p., 1st ed., Cambridge University Press, Cambridge, 2003 (book)
2002
ei
Schölkopf, B., Smola, A.
Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond
pages: 644, Adaptive Computation and Machine Learning, MIT Press, Cambridge, MA, USA, December 2002, Parts of this book, including an introduction to kernel methods, can be downloaded here. (book)
icm
Morphology of Condensed Matter - Physics and Geometry of Spatially Complex Systems
600, pages: 439 p., Lecture Notes in Physics, Springer, Berlin [et al.], 2002 (book)
2000
ei
Smola, A., Bartlett, P., Schölkopf, B., Schuurmans, D.
Advances in Large Margin Classifiers
pages: 422, Neural Information Processing, MIT Press, Cambridge, MA, USA, October 2000 (book)
1992
am
Schaal, S.
Integrierte Wissensverarbeitung mit CAD am Beispiel der konstruktionsbegleitenden Kalkulation (Ways to smarter CAD Systems)
Hanser 1992. (Konstruktionstechnik München Band 8). Zugl. München: TU Diss., München, 1992, clmc (book)