
2024
ei
Besserve, M., Safavi, S., Schölkopf, B., Logothetis, N.
LFP transient events in macaque subcortical areas reveal network coordination across scales and structures: a simultaneous fMRI-electrophysiology study
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ei
Rahaman, N., Weiss, M., Wüthrich, M., Bengio, Y., Li, E., Pal, C., Schölkopf, B.
Language Models Can Reduce Asymmetry in Information Markets
arXiv:2403.14443, March 2024, Published as: Redesigning Information Markets in the Era of Language Models, Conference on Language Modeling (COLM) (techreport)
ei
Shao, K., Xu, Y., Logothetis, N., Shen, Z., Besserve, M.
Koopman Spectral Analysis Uncovers the Temporal Structure of Spontaneous Neural Events
Computational and Systems Neuroscience Meeting (COSYNE), March 2024 (poster)
ei
Ortu, F.
Interpreting How Large Language Models Handle Facts and Counterfactuals through Mechanistic Interpretability
University of Trieste, Italy, March 2024 (mastersthesis)
ev
Achterhold, J., Guttikonda, S., Kreber, J. U., Li, H., Stueckler, J.
Learning a Terrain- and Robot-Aware Dynamics Model for Autonomous Mobile Robot Navigation
CoRR abs/2409.11452, 2024, Preprint submitted to Robotics and Autonomous Systems Journal. https://arxiv.org/abs/2409.11452 (techreport) Submitted
lds
Eberhard, O., Vernade, C., Muehlebach, M.
A Pontryagin Perspective on Reinforcement Learning
Max Planck Institute for Intelligent Systems, 2024 (techreport)
lds
Er, D., Trimpe, S., Muehlebach, M.
Distributed Event-Based Learning via ADMM
Max Planck Institute for Intelligent Systems, 2024 (techreport)
ev
Baumeister, F., Mack, L., Stueckler, J.
Incremental Few-Shot Adaptation for Non-Prehensile Object Manipulation using Parallelizable Physics Simulators
CoRR abs/2409.13228, CoRR, 2024, Submitted to IEEE International Conference on Robotics and Automation (ICRA) 2025 (techreport) Submitted
2023
ei
Sakenyte, U.
Denoising Representation Learning for Causal Discovery
Université de Genèva, Switzerland, December 2023, external supervision (mastersthesis)
ei
Jenny, D.
Navigating the Ocean of Biases: Political Bias Attribution in Language Models via Causal Structures
ETH Zurich, Switzerland, November 2023, external supervision (thesis)
ei
Kofler, A.
Efficient Sampling from Differentiable Matrix Elements
Technical University of Munich, Germany, September 2023 (mastersthesis)
ei
Spieler, A. M.
Intrinsic complexity and mechanisms of expressivity of cortical neurons
University of Tübingen, Germany, March 2023 (mastersthesis)
lds
ei
Kladny, K.
CausalEffect Estimation by Combining Observational and Interventional Data
ETH Zurich, Switzerland, February 2023 (mastersthesis)
ei
Qui, Z.
Towards Generative Machine Teaching
Technical University of Munich, Germany, February 2023 (mastersthesis)
ei
Schneider, F.
ArchiSound: Audio Generation with Diffusion
ETH Zurich, Switzerland, January 2023, external supervision (mastersthesis)
ei
Dittrich, A.
Generation and Quantification of Spin in Robot Table Tennis
University of Stuttgart, Germany, January 2023 (mastersthesis)
dlg
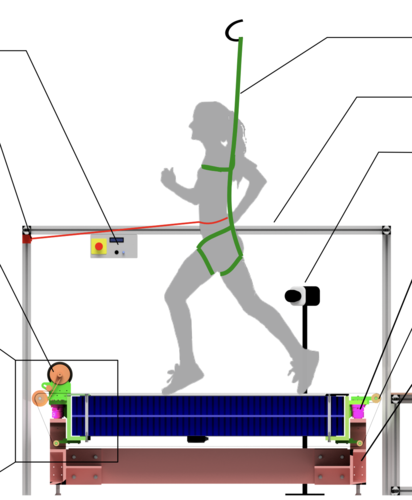
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
ei
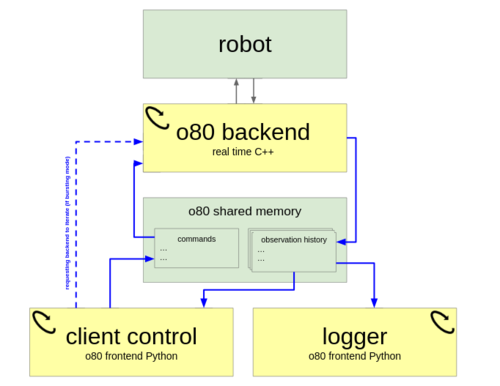
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
ei
Biester, L., Demszky, D., Jin, Z., Sachan, M., Tetreault, J., Wilson, S., Xiao, L., Zhao, J.
Proceedings of the Second Workshop on NLP for Positive Impact (NLP4PI)
Association for Computational Linguistics, December 2022 (proceedings)
ei
Liang, W.
Investigating Independent Mechanisms in Neural Networks
Université Paris-Saclay, France, October 2022 (mastersthesis)
ei
Keidar, D.
Modeling subgroup differences in fMRI data: disentangling subgroup-specific responses from shared ones
ETH Zurich, Switzerland, October 2022 (mastersthesis)
ei
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
ei
Feil, M.
Multi-Target Multi-Object Manipulation using Relational Deep Reinforcement Learning
Technnical University Munich, Germany, September 2022 (mastersthesis)
ei
Sliwa, J.
Independent Mechanism Analysis for High Dimensions
University of Tübingen, Germany, September 2022, (Graduate Training Centre of Neuroscience) (mastersthesis)
ei
Dominguez-Olmedo, R.
On the Adversarial Robustness of Causal Algorithmic Recourse
University of Tübingen, Germany, August 2022 (mastersthesis)
ei
Ghosh, S.
Independent Mechanism Analysis in High-Dimensional Observation Spaces
ETH Zurich, Switzerland, June 2022 (mastersthesis)
dlg
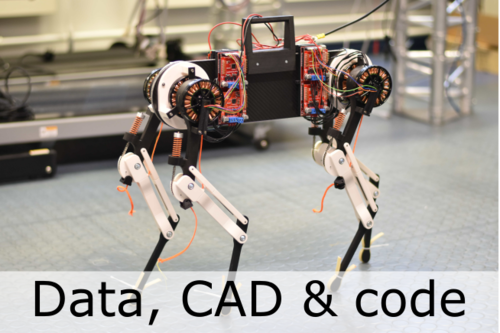
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
ei
Schölkopf, B., Uhler, C., Zhang, K.
Proceedings of the First Conference on Causal Learning and Reasoning (CLeaR 2022)
177, Proceedings of Machine Learning Research, PMLR, April 2022 (proceedings)
dlg
pi
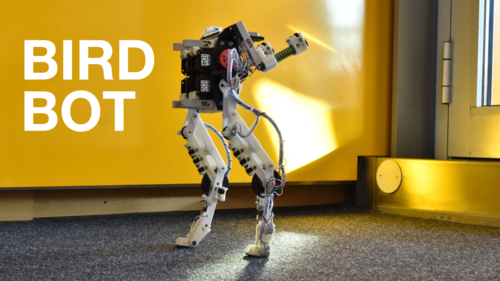
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
mms
Miller, M.
Voltage dependent investigations on the spin polarization of layered heterostructues
Universität Stuttgart, Stuttgart, 2022 (mastersthesis)
2021
ei
Scherrer, N.
Learning Neural Causal Models with Active Interventions
ETH Zurich, Switzerland, November 2021 (mastersthesis)
ei
Bing, S.
HealthGen: Conditional Generation of Realistic Medical Time Series with Informative Missingness
ETH Zurich, Switzerland, October 2021 (mastersthesis)
ei
Lanzillotta, G.
Study of the Interventional Consistency of Autoencoders
ETH Zurich, Switzerland, October 2021 (mastersthesis)
ev
Strecke, M., Stückler, J.
Physically Plausible Tracking & Reconstruction of Dynamic Objects
KIT Science Week Scientific Conference & DGR-Days 2021, October 2021 (talk)
ei
Mambelli, D.
Training with Few to Manipulate Many. On OOD generalization in relational reinforcement learning
ETH Zurich, Switzerland, October 2021 (mastersthesis)
ei
Field, A., Prabhumoye, S., Sap, M., Jin, Z., Zhao, J., Brockett, C.
Proceedings of the 1st Workshop on NLP for Positive Impact
Association for Computational Linguistics, August 2021 (proceedings)
re
Frederic Becker, , Lieder, F.
Promoting metacognitive learning through systematic reflection
The first edition of Life Improvement Science Conference, June 2021 (poster)
re
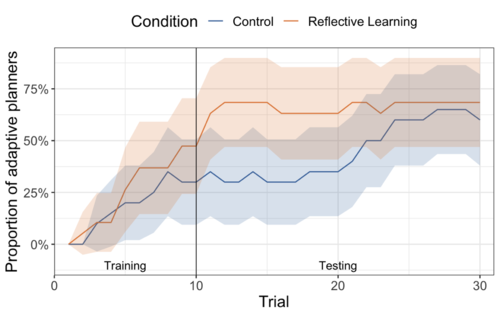
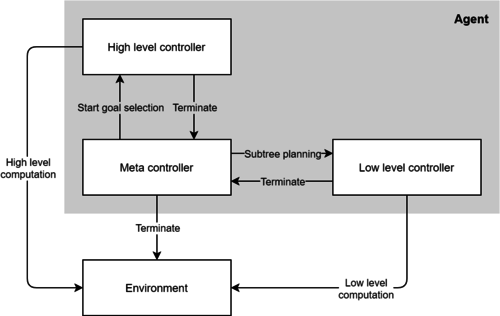
Heindrich, L., Consul, S., Stojcheski, J., Lieder, F.
Improving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Tübingen, Germany, The first edition of Life Improvement Science Conference, June 2021 (talk) Accepted
re
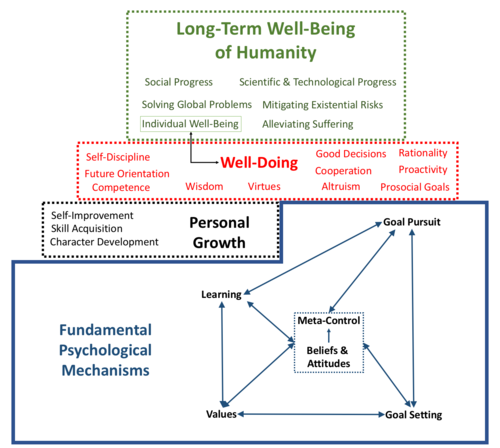
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
hi
Krauthausen, F.
Robotic Surgery Training in AR: Multimodal Record and Replay
pages: 1-147, University of Stuttgart, Stuttgart, May 2021, Study Program in Software Engineering (mastersthesis)
mms
Alten, F.
Direct detection of spin Hall effect induced torques in platinum/ferromagnetic bilayer systems
Universität Stuttgart, Stuttgart, January 2021 (mastersthesis)
pio
Zottino, N.
Community detection in heterogeneously attributed networks
Politecnico di Torino, 2021 (mastersthesis)
2020
mms
Nacke, R.
Voltage dependent interfacial magnetism in multilayer systems
Universität Stuttgart, Stuttgart, December 2020 (thesis)
mms
Sauter, R.
Hydromagnonics: Manipulation of magnonic systems with hydrogen
Universität Stuttgart, Stuttgart, December 2020 (mastersthesis)
ei
Ahmed, O.
A Robotic Manipulation Benchmark for Causal Structure and Transfer Learning
ETH Zurich, Switzerland, October 2020 (mastersthesis)
ei
DuMont Schütte, A.
A Comprehensive Benchmark Evaluation of Synthetic Data Generation for Biomedical Imaging
ETH Zurich, Switzerland, October 2020 (mastersthesis)
dlg
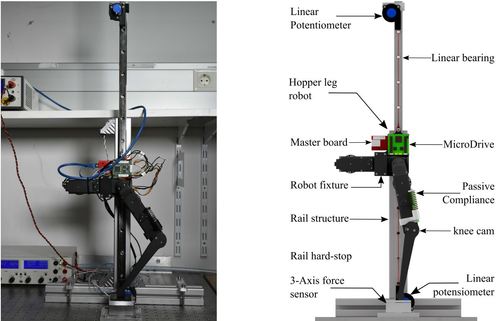
Milad Shafiee Ashtiani, A. A. S., Badri-Sproewitz, A.
Towards Hybrid Active and Passive Compliant Mechanisms in Legged Robots
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2020 (poster) Accepted
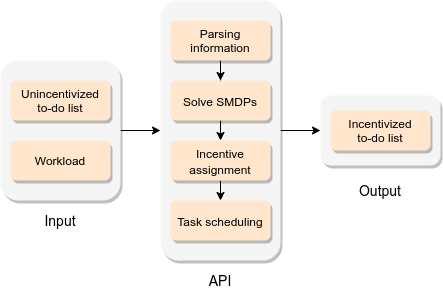
re
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
ei
Cacioppo, A.
Deep learning for the parameter estimation of tight-binding Hamiltonians
University of Roma, La Sapienza, Italy, May 2020 (mastersthesis)