2023
ei
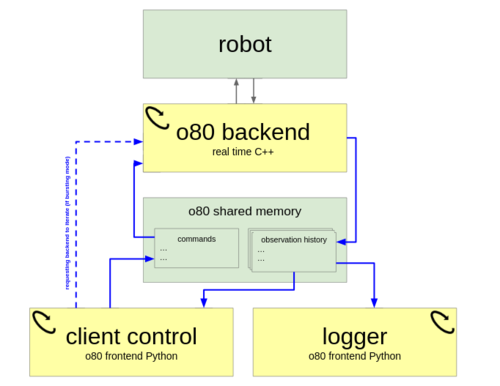
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)

ev
Elich, C., Kirchdorfer, L., Köhler, J. M., Schott, L.
Challenging Common Assumptions in Multi-task Learning
abs/2311.04698, CoRR/arxiv, 2023 (techreport)
2022
dlg
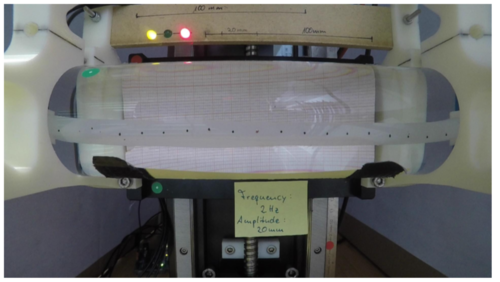
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
dlg
pi
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
2021
re
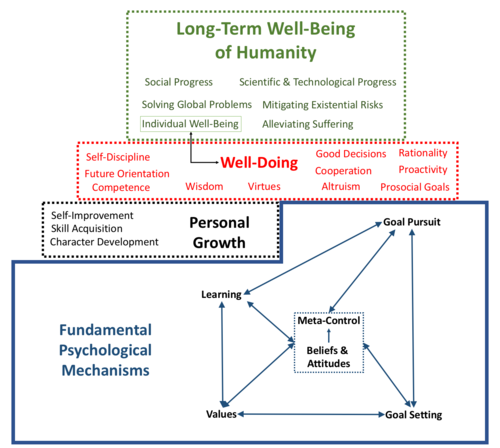
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
2020
re
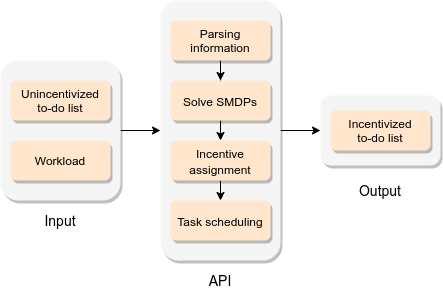
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
icm
Dertli, Denis
Nichtgleichgewichtsdynamik einer abgekühlten kritischen Flüssigkeit mit Oberflächenfeldern unterschiedlichen Vorzeichens
Universität Stuttgart, Stuttgart, January 2020 (thesis)
ics
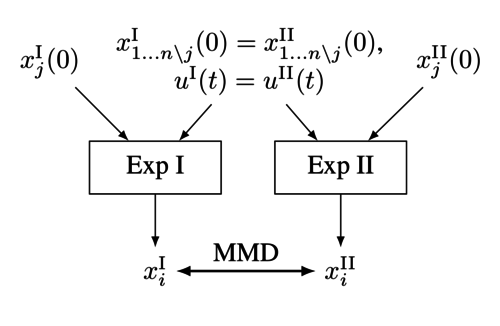
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)
2019
ei
Lutz, P.
Automatic Segmentation and Labelling for Robot Table Tennis Time Series
Technical University Darmstadt, Germany, August 2019 (thesis)
icm
Pranjić, Daniel
Fluctuating interface with a pinning potential
Universität Stuttgart, Stuttgart, 2019 (thesis)
icm
Beyer, David Bernhard
Controlling pattern formation in the confined Schnakenberg model
Universität Stuttgart, Stuttgart, 2019 (thesis)

pf
Itzigehl, Selina
HPLC separation of ligand-exchanged gold clusters with atomic precision
Univ. of Stuttgart, 2019 (thesis)
2018
ev
Ma, L., Stueckler, J., Wu, T., Cremers, D.
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform
arxiv, 2018, arXiv:1808.01834 (techreport)
dlg
Richter, J.
Untersuchung und Charakterisierung von Teilelementen der Modifikation im Lumbosacralbereich von Vögeln
Hochschule Harz, 2018 (thesis)
icm
Maihöfer, Michael
Pattern forming systems under confinement
Universität Stuttgart, Stuttgart, 2018 (thesis)
icm
Bebon, Rick
Electrostatic interaction between colloids with constant surface potentials at fluid interfaces
Universität Stuttgart, Stuttgart, 2018 (thesis)
icm
Wilke, Moritz
Non-equilibrium dynamics of a binary solvent around heated colloidal particles
Universität Stuttgart, Stuttgart, 2018 (thesis)
slt
Keriven, N., Garreau, D., Poli, I.
NEWMA: a new method for scalable model-free online change-point detection
2018 (techreport)
icm
Meiler, Tim
Monte Carlo study of colloidal structure formation at fluid interfaces
Universität Stuttgart, Stuttgart, 2018 (thesis)

pf
Hornberger, Lea-Sophie
DNA-linked gold nanoclusters
Univ. of Stuttgart, 2018 (thesis)
icm
Sattler, Alexander
Surface structure of liquid crystals
Universität Stuttgart, Stuttgart, 2018 (thesis)

pf
Vogt, Pascal
HPLC-Trennung von Gold-clustern
Univ. of Stuttgart, 2018 (thesis)
2017
icm
Hölzl, Christian
Non-equilibrium forces after temperature quenches in ideal fluids with conserved density
Universität Stuttgart, Stuttgart, 2017 (thesis)

pf
Troll, Jonas
Enzyme activity and transport in biological media
Univ. of Stuttgart, 2017 (thesis)

pf
Segreto, Nico
Propulsion of magnetic colloids at low Reynolds number
Univ. of Stuttgart, 2017 (thesis)
zwe-sw
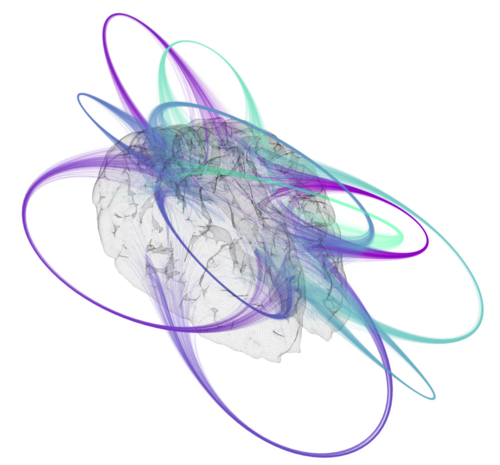
Bramlage, L.
Design of a visualization scheme for functional connectivity data of Human Brain
Hochschule Osnabrück - University of Applied Sciences, 2017 (thesis)
icm
Schmetzer, Timo
Electrostatic interaction between non-identical charged particles at an electrolyte interface
Universität Stuttgart, Stuttgart, 2017 (thesis)
2016
am
ics
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
am
ics
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
ei
Abbott, T., Abdalla, F. B., Allam, S., Amara, A., Annis, J., Armstrong, R., Bacon, D., Banerji, M., Bauer, A. H., Baxter, E., others,
Cosmology from Cosmic Shear with DES Science Verification Data
arXiv preprint arXiv:1507.05552, 2015 (techreport)
ei
Jarvis, M., Sheldon, E., Zuntz, J., Kacprzak, T., Bridle, S. L., Amara, A., Armstrong, R., Becker, M. R., Bernstein, G. M., Bonnett, C., others,
The DES Science Verification Weak Lensing Shear Catalogs
arXiv preprint arXiv:1507.05603, 2015 (techreport)
2014
ps
Freifeld, O., Hauberg, S., Black, M. J.
Model transport: towards scalable transfer learning on manifolds - supplemental material
(9), April 2014 (techreport)
2013
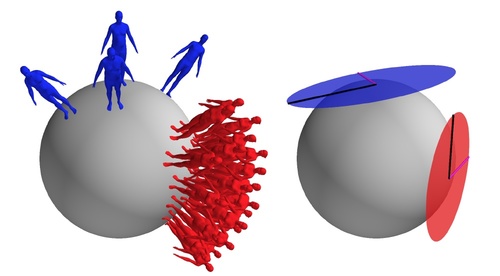
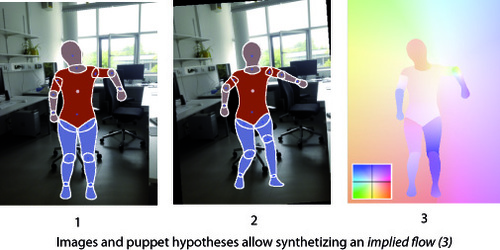
ps
Zuffi, S., Black, M. J.
Puppet Flow
(7), Max Planck Institute for Intelligent Systems, October 2013 (techreport)
am
Sankaran, B., Ghazvininejad, M., He, X., Kale, D., Cohen, L.
Learning and Optimization with Submodular Functions
ArXiv, May 2013 (techreport)

ps
Sun, D., Roth, S., Black, M. J.
A Quantitative Analysis of Current Practices in Optical Flow Estimation and the Principles Behind Them
(CS-10-03), Brown University, Department of Computer Science, January 2013 (techreport)
ei
pn
Hennig, P.
Animating Samples from Gaussian Distributions
(8), Max Planck Institute for Intelligent Systems, Tübingen, Germany, 2013 (techreport)
ei
Hogg, D. W., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Lang, D., Montet, B. T., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Detailed models of the focal plane in the two-wheel era
arXiv:1309.0653, 2013 (techreport)
ei
Montet, B. T., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Hogg, D. W., Lang, D., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Searching the habitable zones of the brightest stars
arXiv:1309.0654, 2013 (techreport)

2012
ps
Hirshberg, D., Loper, M., Rachlin, E., Black, M. J.
Coregistration: Supplemental Material
(No. 4), Max Planck Institute for Intelligent Systems, October 2012 (techreport)

ps
Freifeld, O., Black, M. J.
Lie Bodies: A Manifold Representation of 3D Human Shape. Supplemental Material
(No. 5), Max Planck Institute for Intelligent Systems, October 2012 (techreport)

ps
Butler, D. J., Wulff, J., Stanley, G. B., Black, M. J.
MPI-Sintel Optical Flow Benchmark: Supplemental Material
(No. 6), Max Planck Institute for Intelligent Systems, October 2012 (techreport)
ei
Grosse-Wentrup, M., Schölkopf, B.
High Gamma-Power Predicts Performance in Brain-Computer Interfacing
(3), Max-Planck-Institut für Intelligente Systeme, Tübingen, February 2012 (techreport)
2011
ei
Seldin, Y., Laviolette, F., Shawe-Taylor, J., Peters, J., Auer, P.
PAC-Bayesian Analysis of Martingales and Multiarmed Bandits
Max Planck Institute for Biological Cybernetics, Tübingen, Germany, May 2011 (techreport)
ei
Schuler, C., Hirsch, M., Harmeling, S., Schölkopf, B.
Non-stationary Correction of Optical Aberrations
(1), Max Planck Institute for Intelligent Systems, Tübingen, Germany, May 2011 (techreport)
ei
Nickisch, H., Seeger, M.
Multiple Kernel Learning: A Unifying Probabilistic Viewpoint
Max Planck Institute for Biological Cybernetics, March 2011 (techreport)
ei
Langovoy, M., Wittich, O.
Multiple testing, uncertainty and realistic pictures
(2011-004), EURANDOM, Technische Universiteit Eindhoven, January 2011 (techreport)
ei
Sra, S.
Nonconvex proximal splitting: batch and incremental algorithms
(2), Max Planck Institute for Intelligent Systems, Tübingen, Germany, 2011 (techreport)
2010
ei
Langovoy, M., Wittich, O.
Computationally efficient algorithms for statistical image processing: Implementation in R
(2010-053), EURANDOM, Technische Universiteit Eindhoven, December 2010 (techreport)
ei
Seeger, M., Nickisch, H.
Fast Convergent Algorithms for Expectation Propagation Approximate Bayesian Inference
Max Planck Institute for Biological Cybernetics, December 2010 (techreport)