Simple and low-cost compliant leg-foot system
2004
Conference Paper
dlg
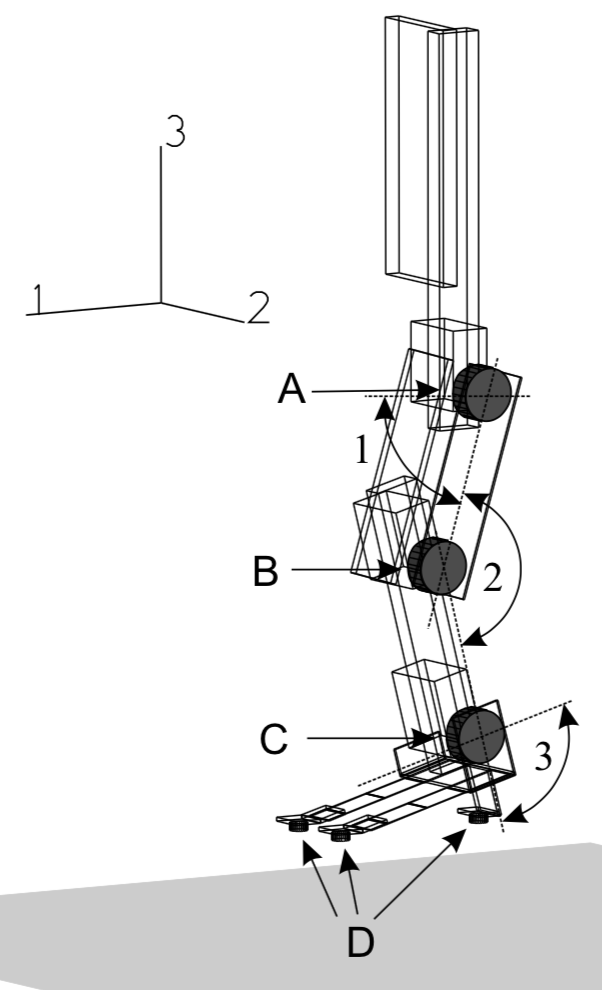
We present the design of a simple and low- cost humanoid leg-foot system featuring compliant joints and springy feet. The mechanical compliance of the individual joints can be adjusted by means of visco-elastic material, or metal. To explore some of the relevant characteristics of the proposed system, we performed a series of experiments in which the leg was dropped from a fixed height. Combinations of different materials in the joints (silicone rubber, latex, and brass) as well as a rigid or a compliant foot were used. Additional data were obtained through of a Lagrangian analysis of the leg-foot system. Our analyses show that compliant joints not only reduce impactive forces, but also induce smoother joint trajectories. Further, by employing a compliant foot, a higher energy efficiency for the movement is achieved.
| Author(s): | Meyer, Friedrich and Spröwitz, Alexander and Lungarella, Maximilian and Berthouze, Luc |
| Book Title: | Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004) |
| Volume: | 1 |
| Pages: | 515--520 |
| Year: | 2004 |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/IROS.2004.1389404 |
| Address: | Sendai, Japan |
|
BibTex @inproceedings{iros_2004,
title = {Simple and low-cost compliant leg-foot system},
author = {Meyer, Friedrich and Spr{\"o}witz, Alexander and Lungarella, Maximilian and Berthouze, Luc},
booktitle = {Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004)},
volume = {1},
pages = {515--520},
publisher = {IEEE},
address = {Sendai, Japan},
year = {2004},
doi = {10.1109/IROS.2004.1389404}
}
|
|